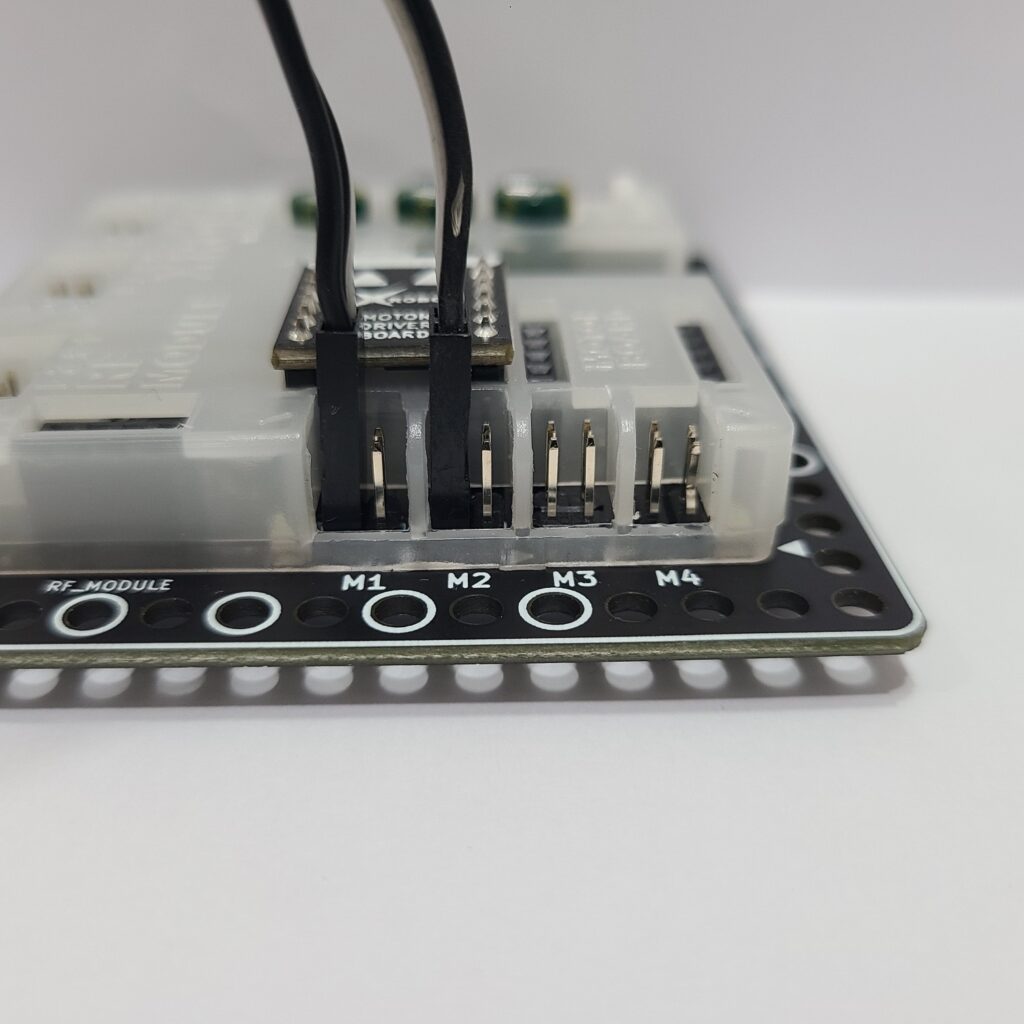
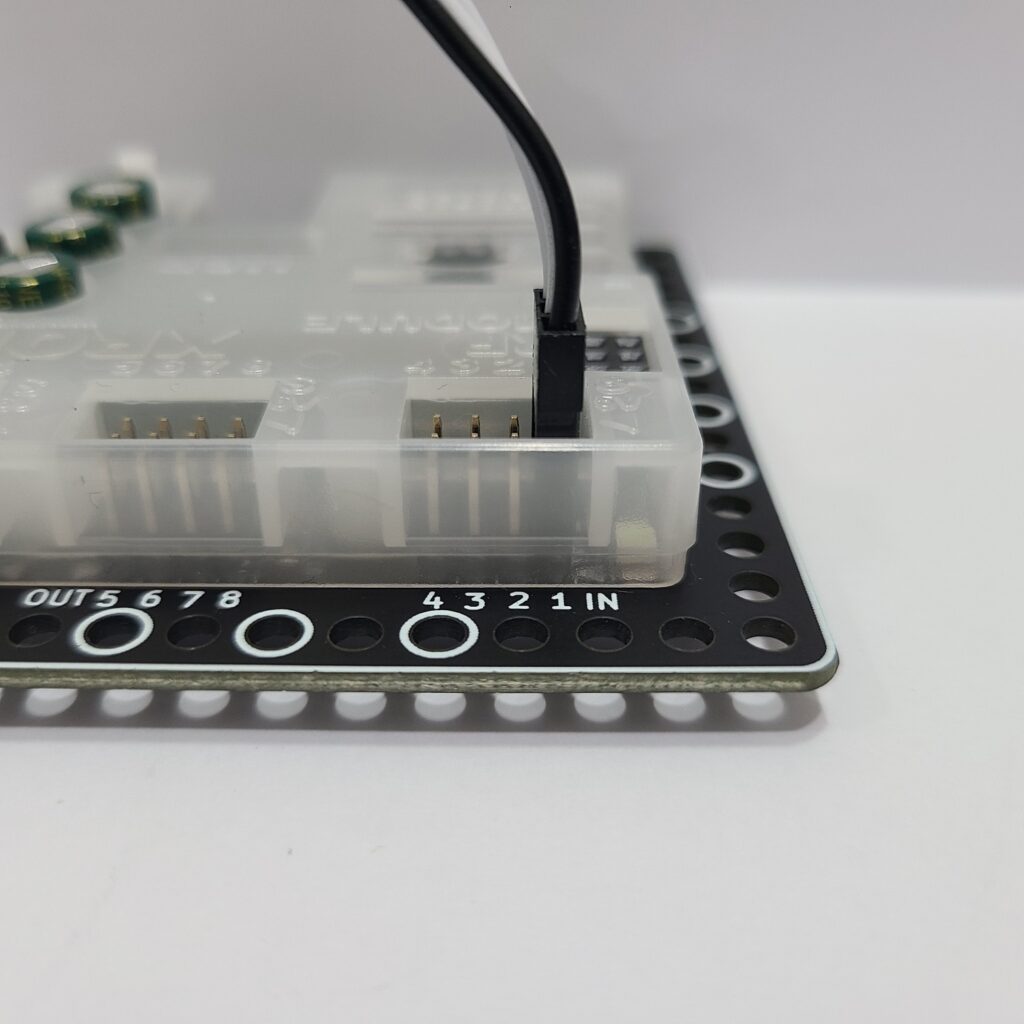
Confirm that the motor cables are inserted vertically into the motor ports on the CPU board. If connected horizontally, the motor may not rotate.
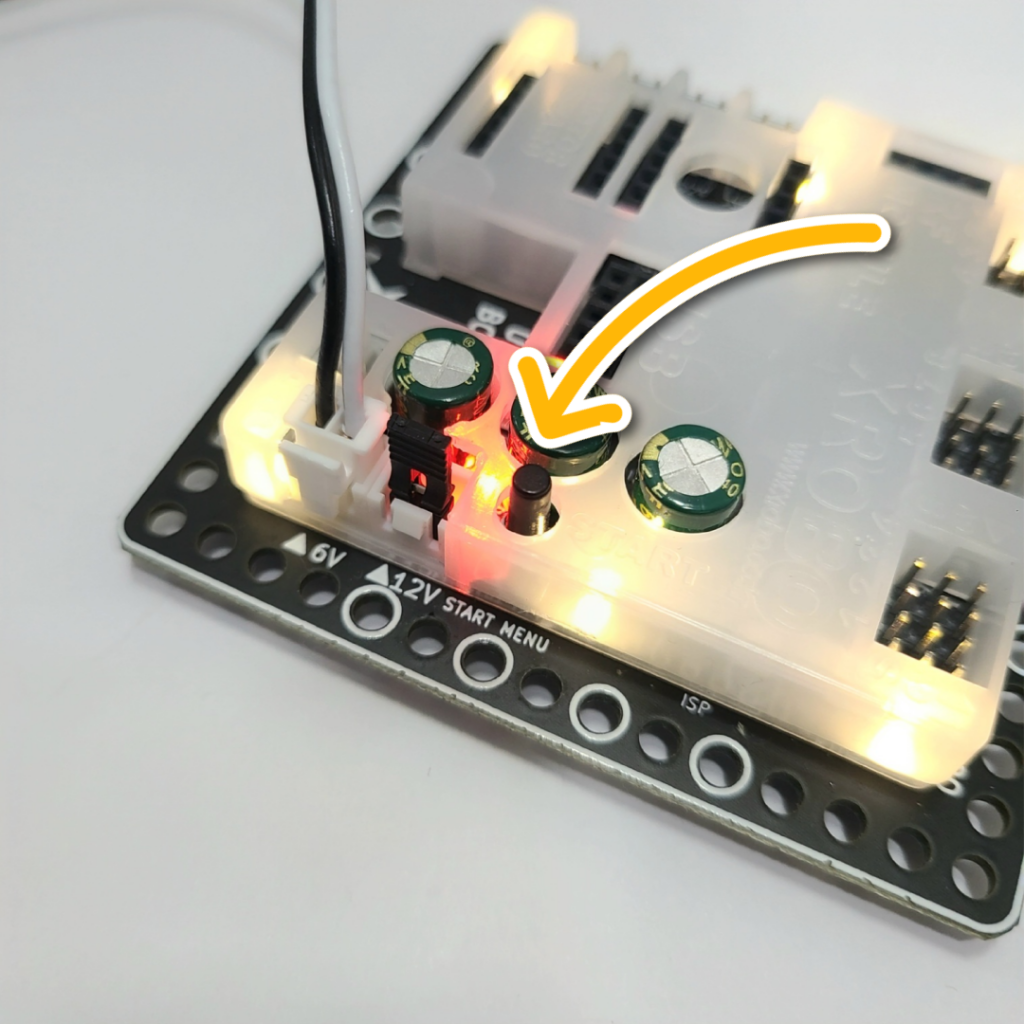
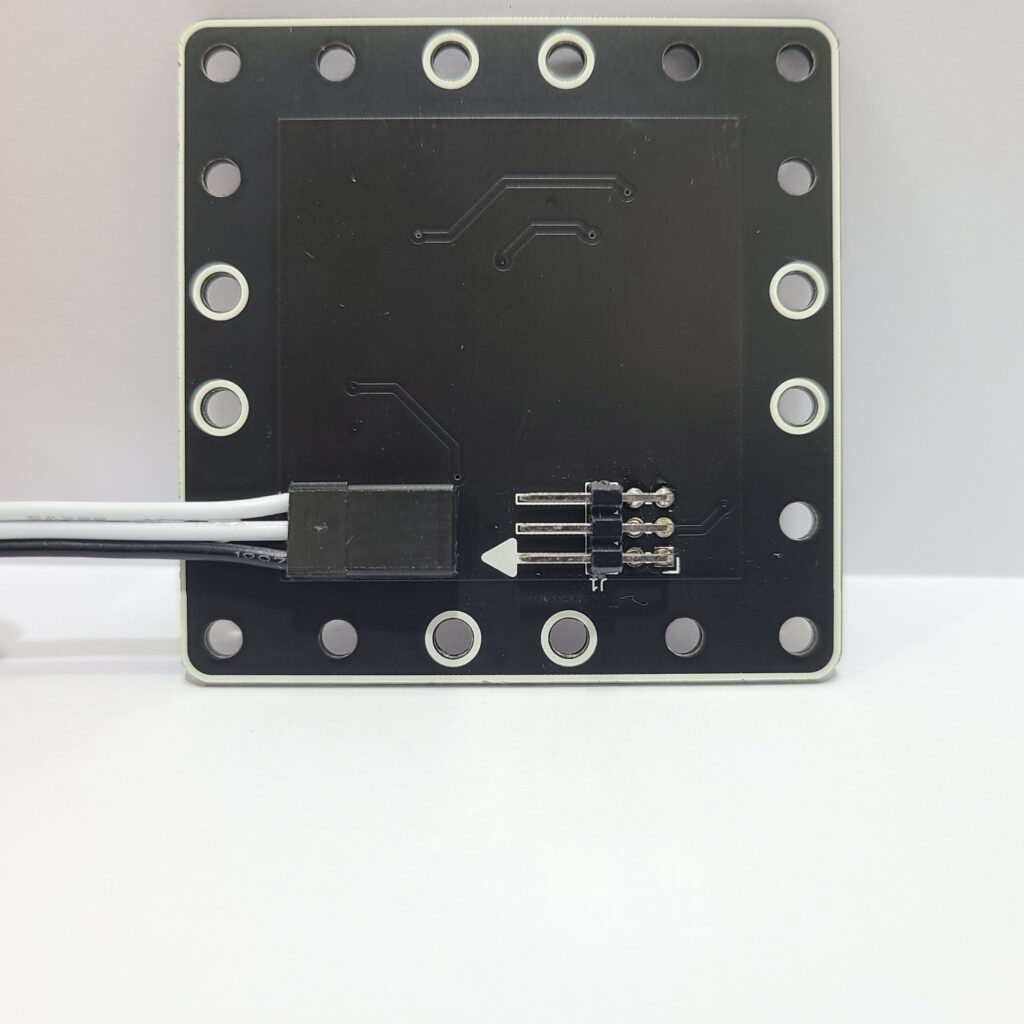
Ensure the black wire of the motor cable is aligned with the arrow on the CPU board case. If connected in reverse, the DC motor will rotate in the opposite direction.
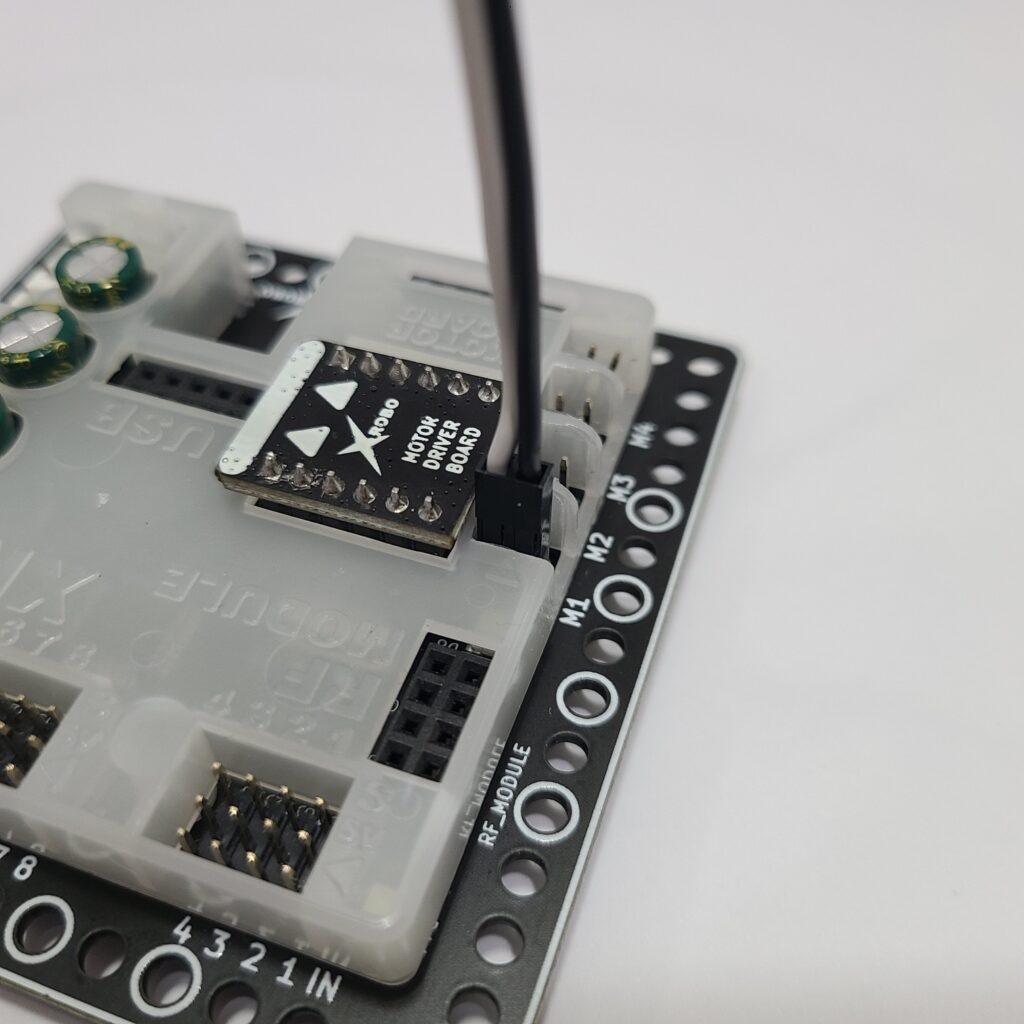
If the DC motor driver board is not inserted according to the assembly diagram, do not turn on the power. Insert it correctly as per the assembly diagram to avoid overheating risks during operation.
If the DC motor driver board is not inserted, place it properly and then turn on the power to check the operation.
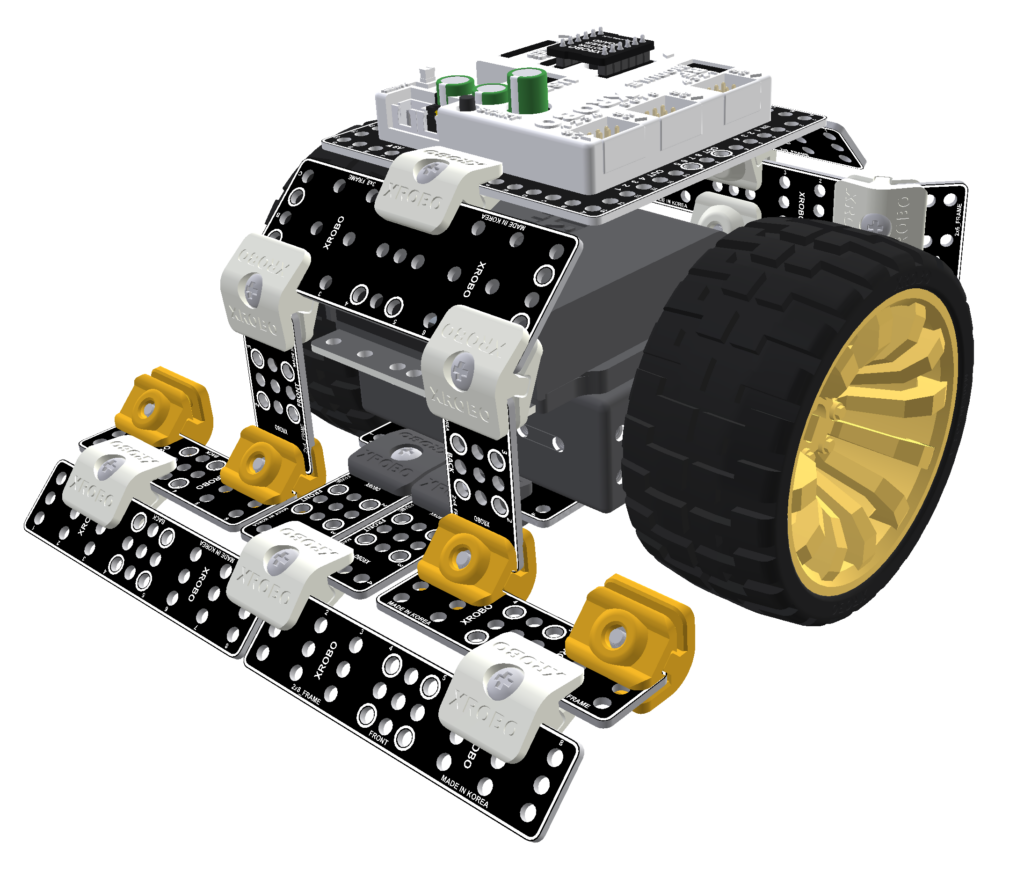
Ensure that the shafts of the left and right DC motors are assembled so that they face the back of the robot. If the motor shafts are incorrectly assembled, the wheels may catch on the frame, preventing proper operation.
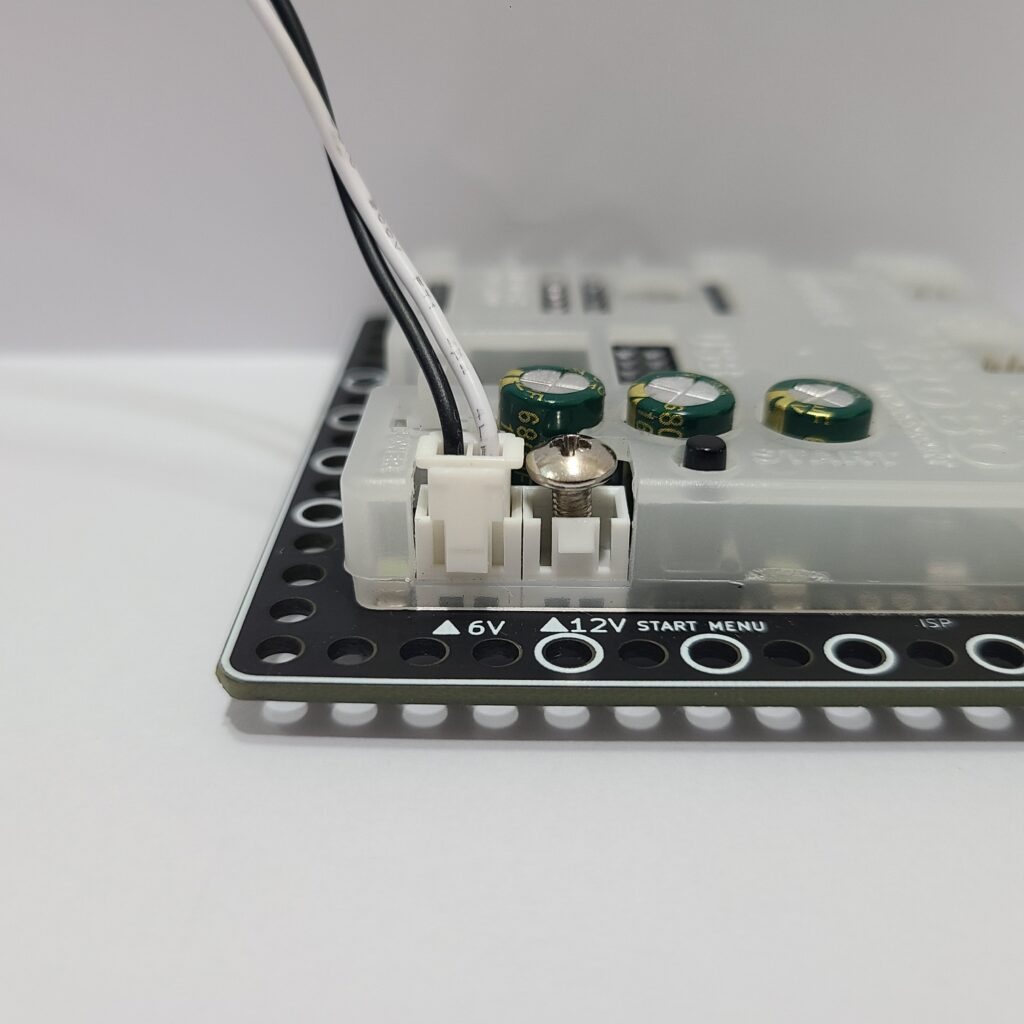
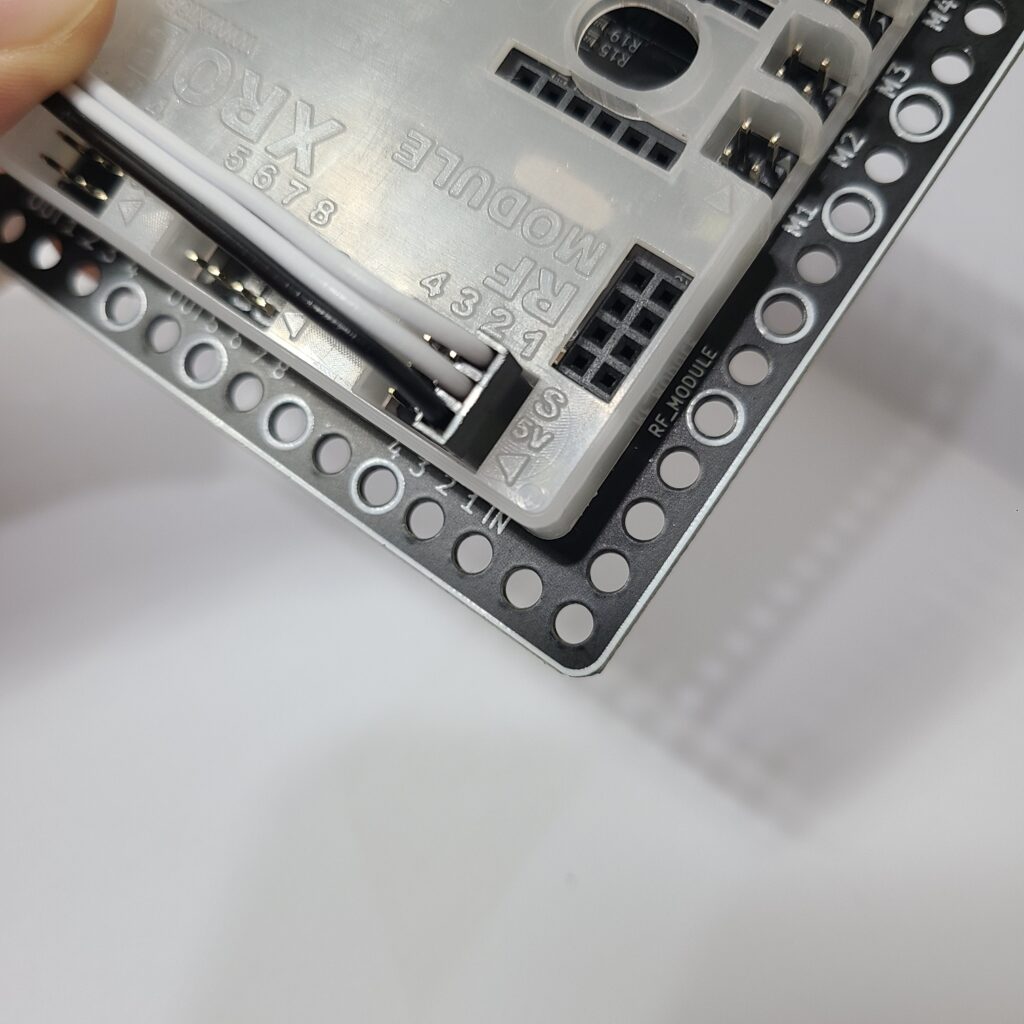
Verify that the black wire of the 3-PIN cable is connected to the side with the white line on the X-keypad pin. (Inserting the 3-PIN cable in reverse can cause a short circuit, resetting the CPU board.)
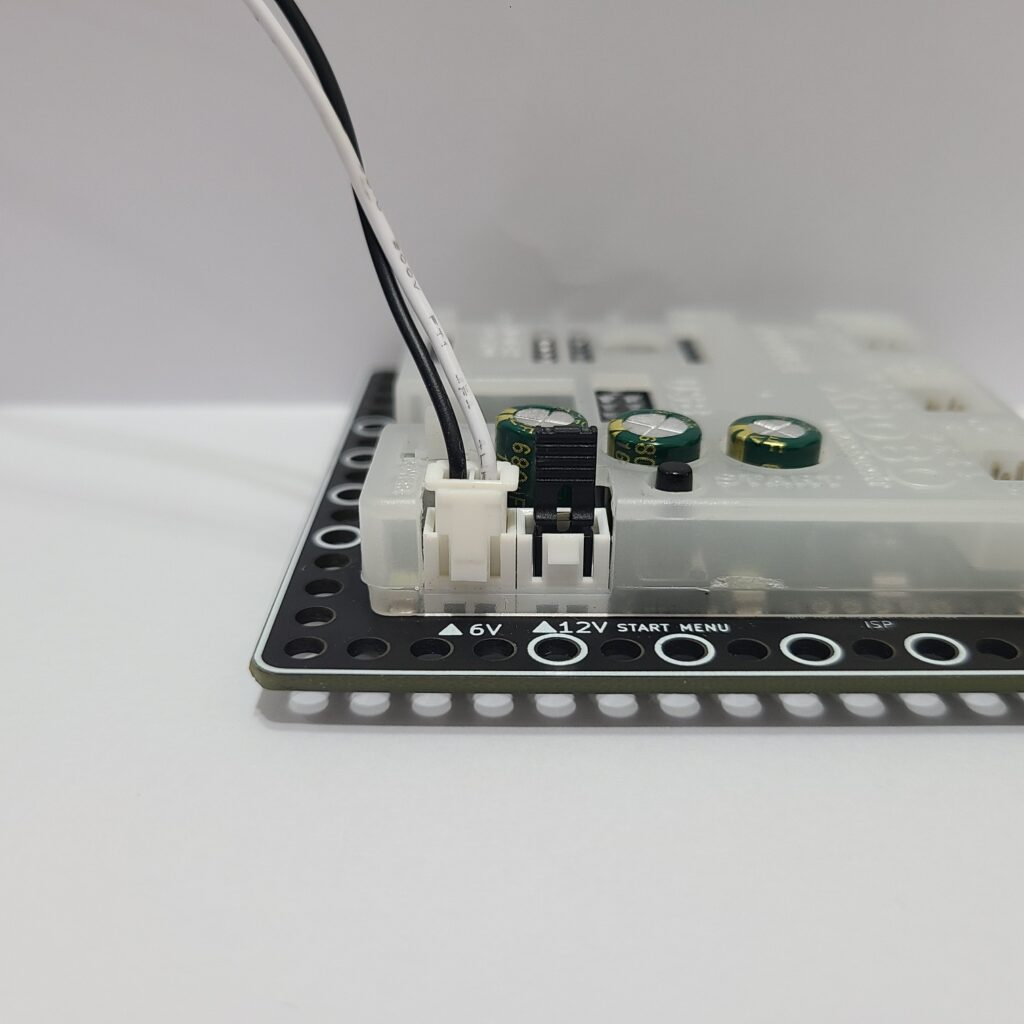
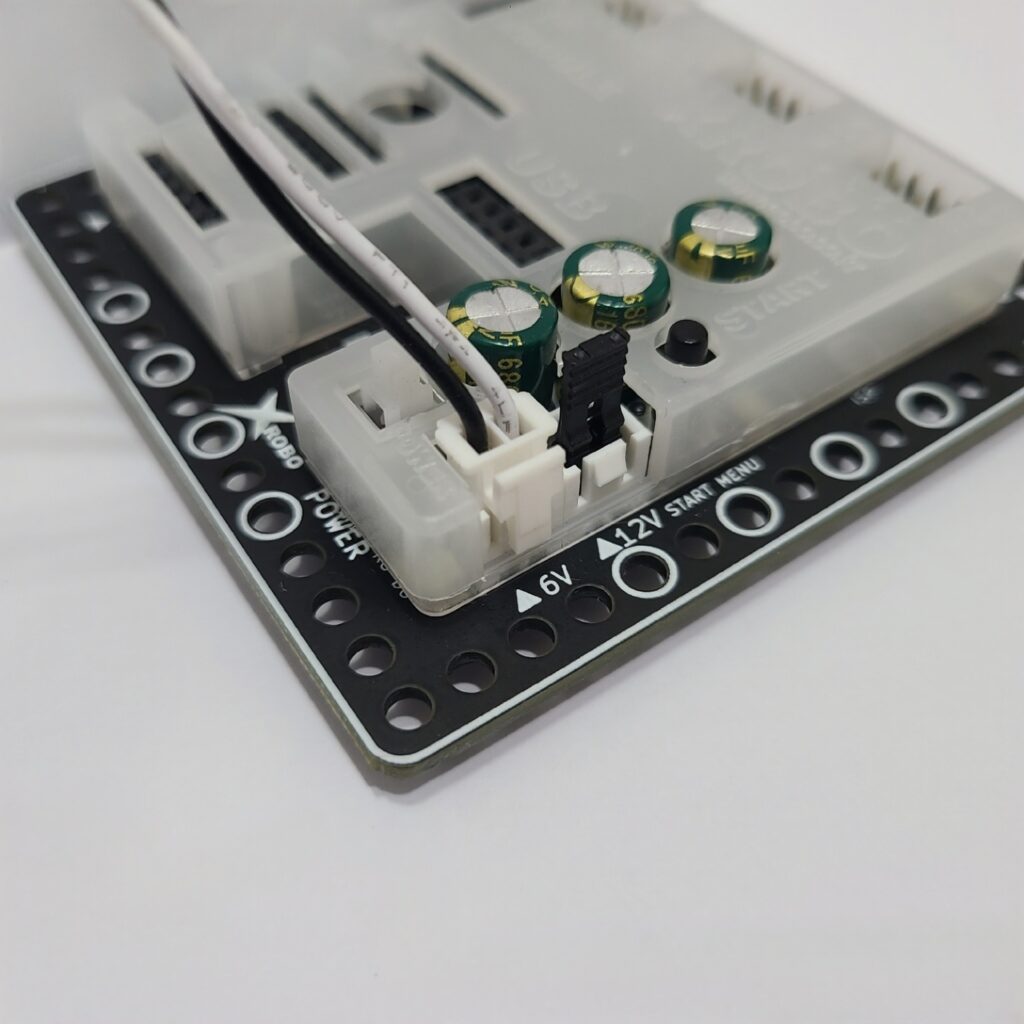
Ensure that the black wire of the 3-PIN cable is aligned with the arrow on the CPU board case. (Reversing the 3-PIN cable can cause a short circuit, resetting the CPU board.)