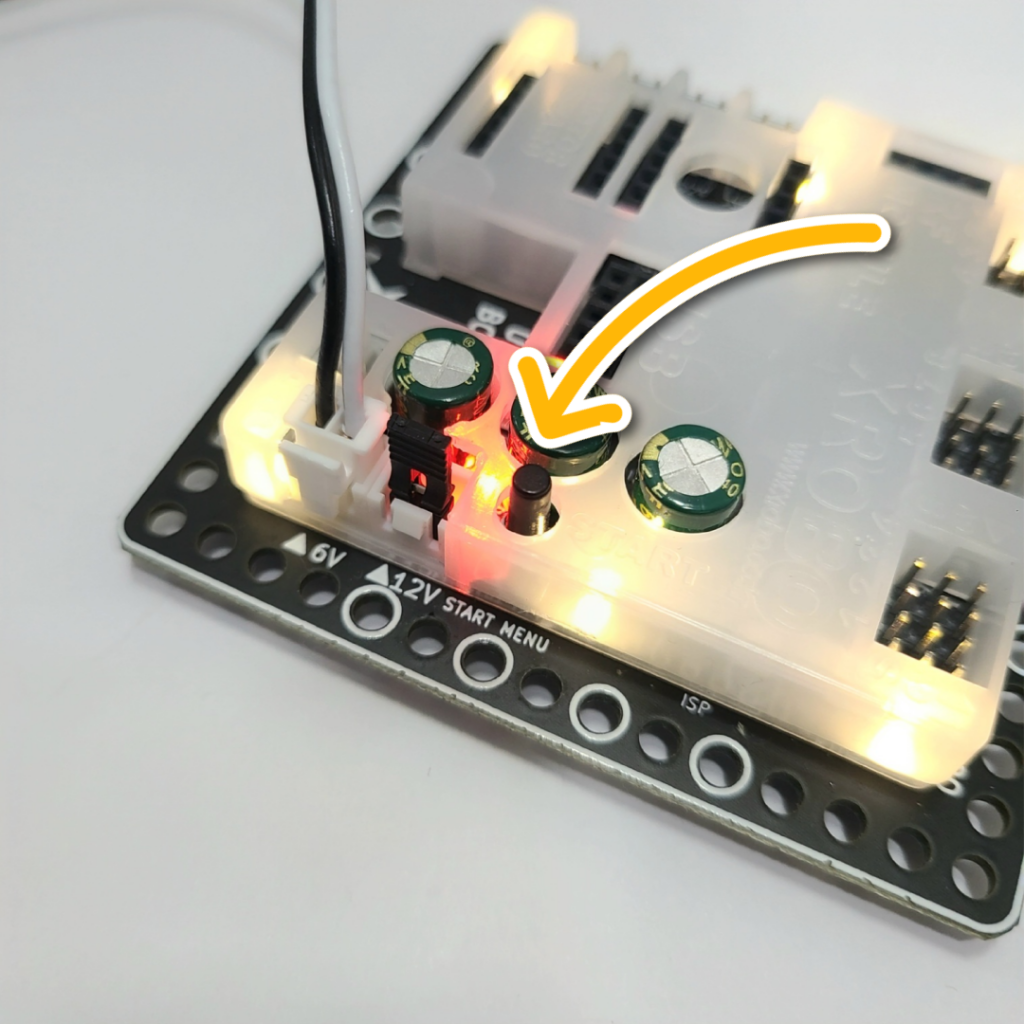
② Briefly press the START button on the CPU board and then release it.
③ Turn on the power to the remote control and have fun controlling the robot.
3. Coding Examples
1) Rotating the Robot in Place
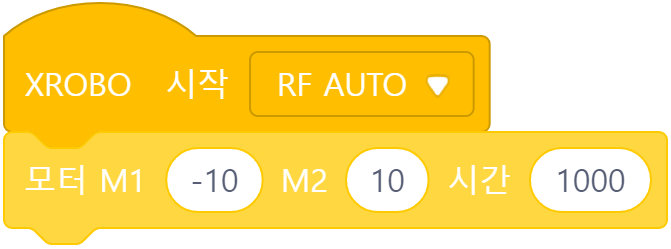
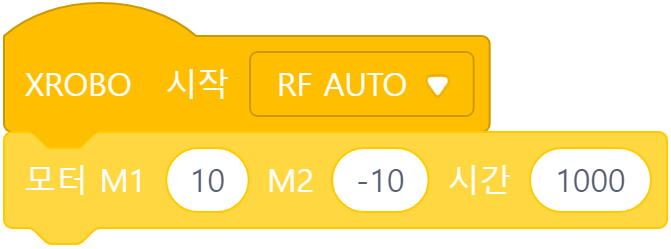
Rotate Left
Let’s make the Ninja rotate in place to the left (counterclockwise) at a speed of 10 for 1 second.
If the speed value is prefixed with a ‘-‘, the DC motor will rotate in the opposite direction.
Rotate Right
Let’s make the Ninja rotate in place to the right (clockwise) at a speed of 10 for 1 second.
2) Playing a Melody
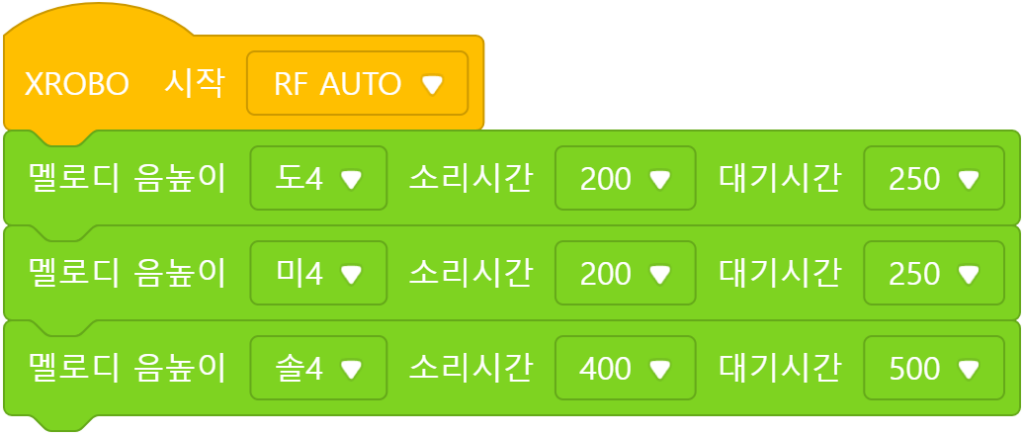
Play ‘Do, Mi, Sol-‘
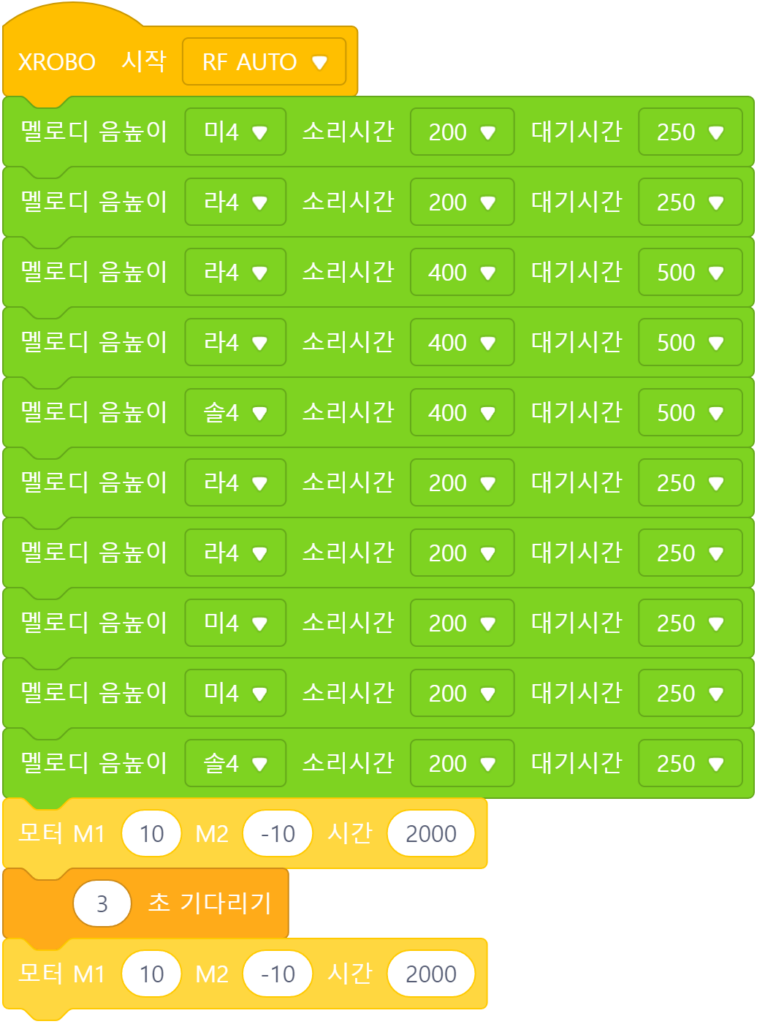
Let’s play the melody ‘Do, Mi, Sol-‘ with a sound duration of 200 and a wait time of 250. Notes with a ‘-‘ symbol at the end are played twice as long as the others.
When playing notes with a ‘-‘, double the sound duration and wait time to 400 and 500, respectively.
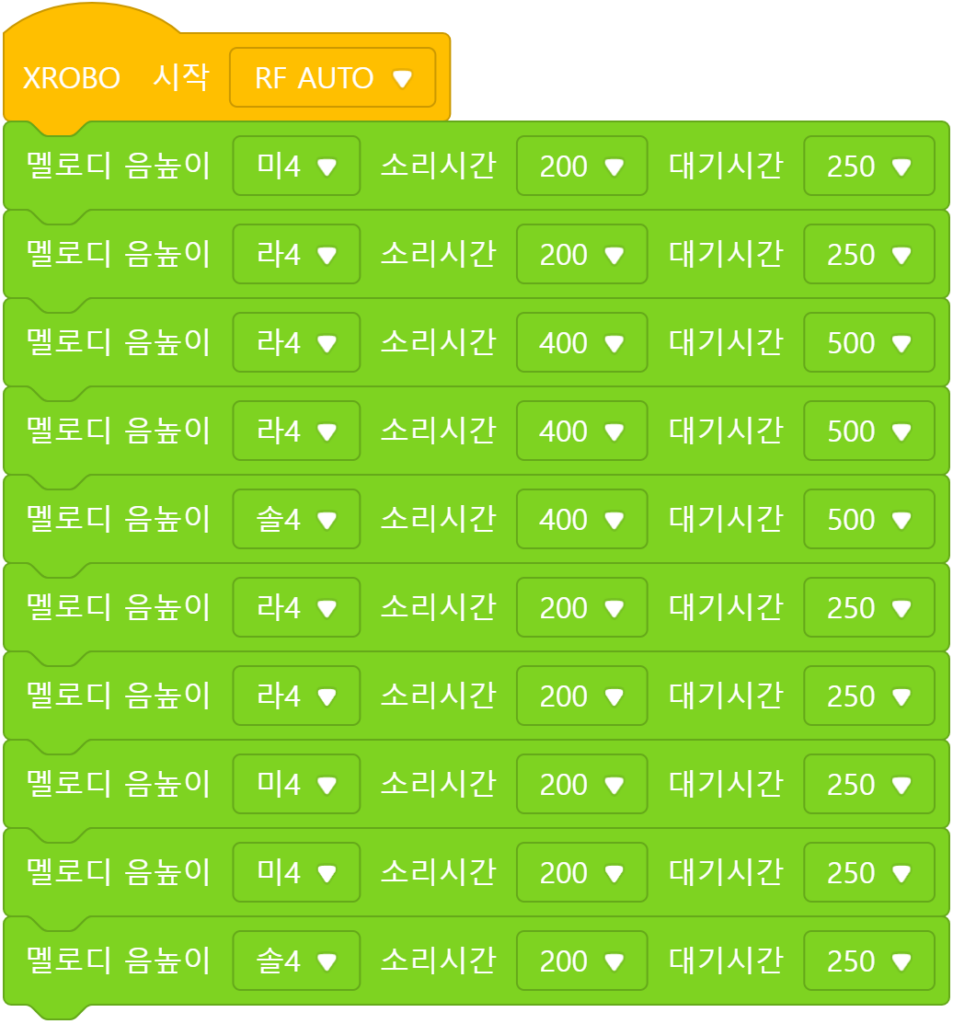
Let’s play the melody ‘Mi, La, La-, La-, Sol-, La, La, Mi, Mi, Sol’ with a sound duration of 200 and a wait time of 250. Notes with a ‘-‘ symbol at the end are played twice as long as the others.
3) Playing the ‘Red Light, Green Light’ Game
Move in the Following Sequence
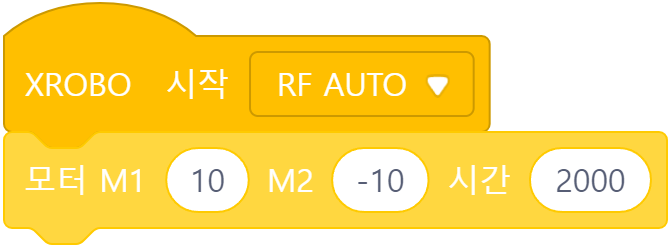
Turn Around Right (Clockwise)
If the Ninja does not fully rotate when coded for a time of ‘2000’, increase the time. If the Ninja rotates too much, decrease the time until you find the precise amount of time needed for the Ninja to fully turn around.
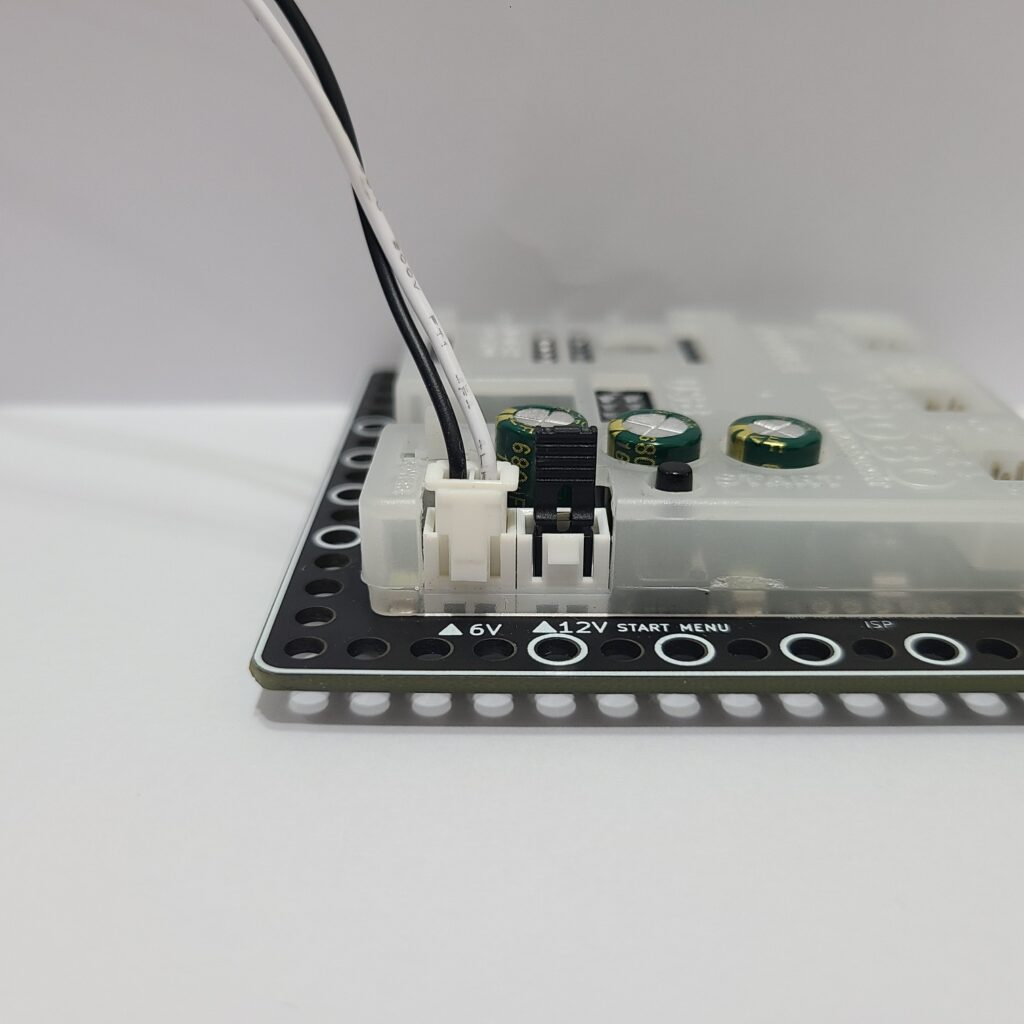
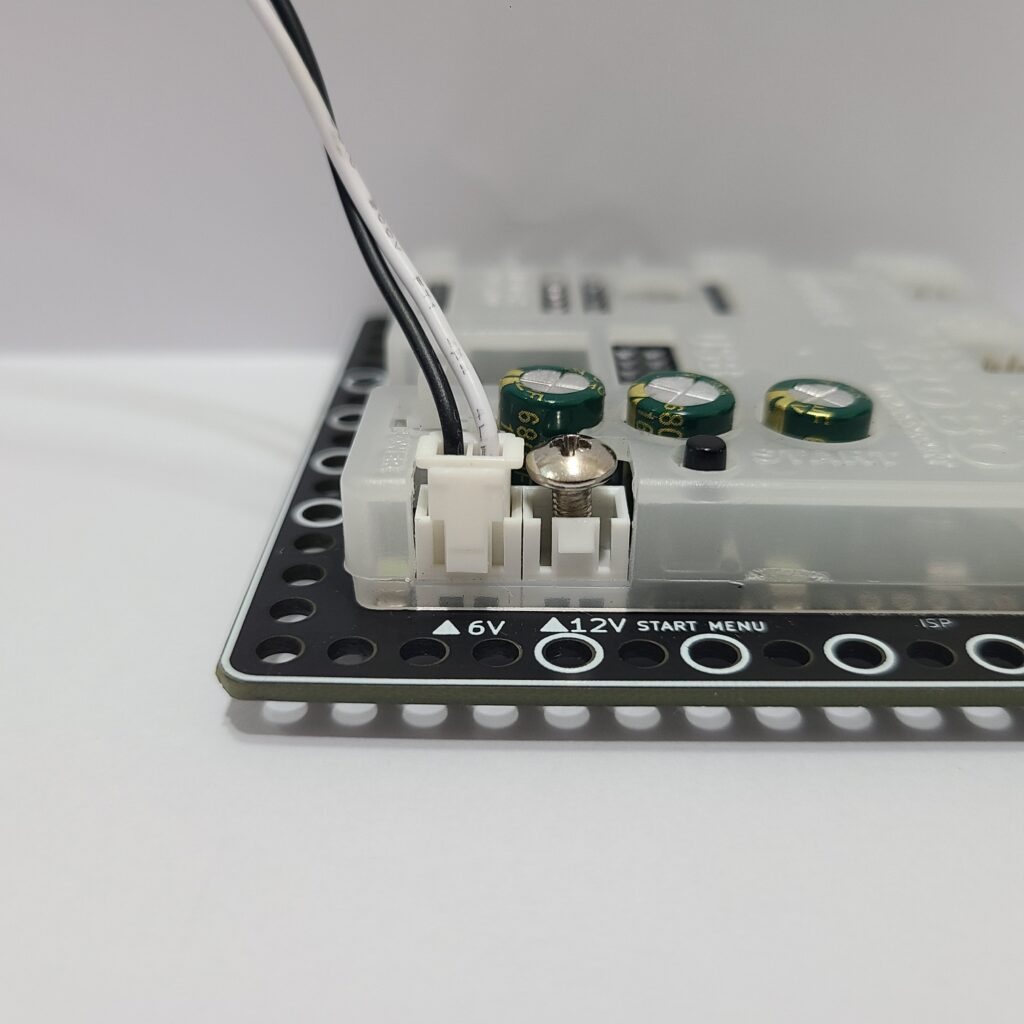
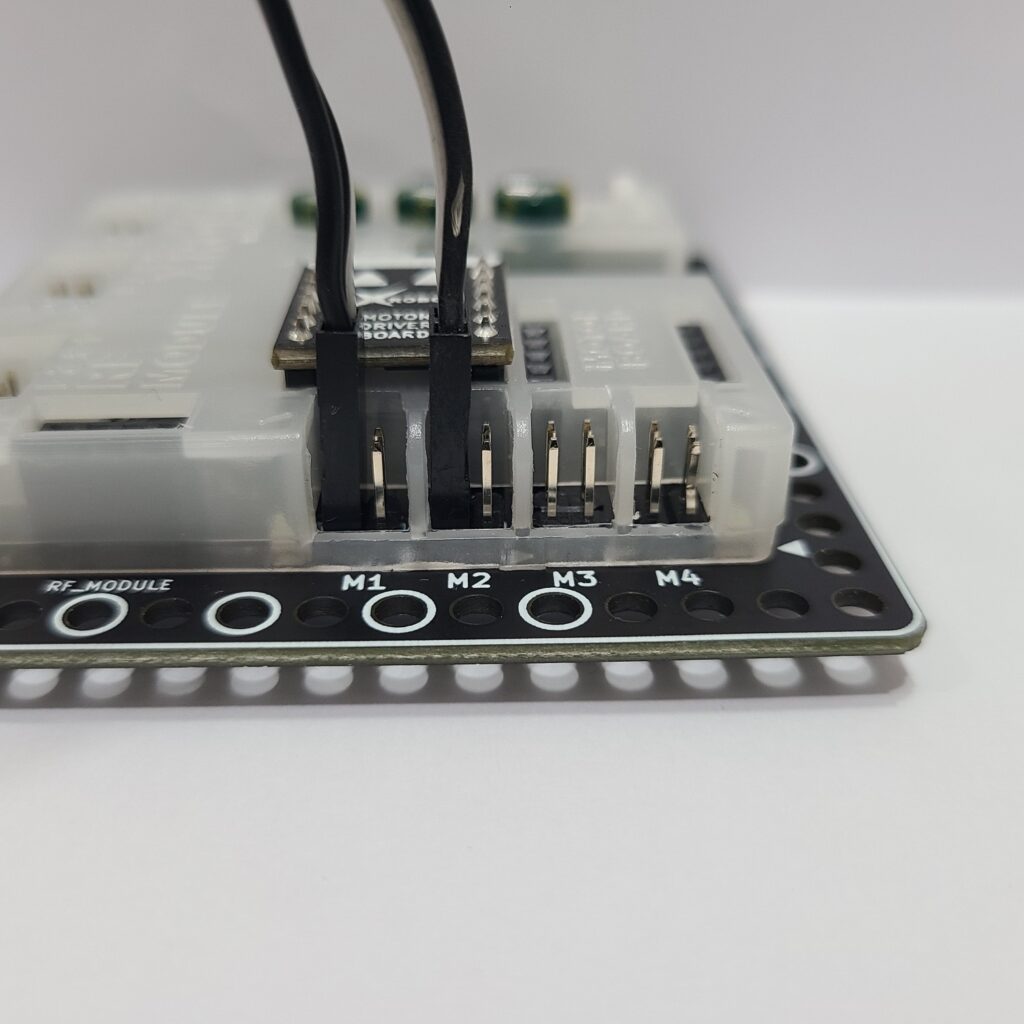
Confirm that the motor cables are inserted vertically into the motor ports on the CPU board. If connected horizontally, the motor may not rotate.
Ensure the black wire of the motor cable is aligned with the arrow on the CPU board case. If connected in reverse, the DC motor will rotate in the opposite direction.
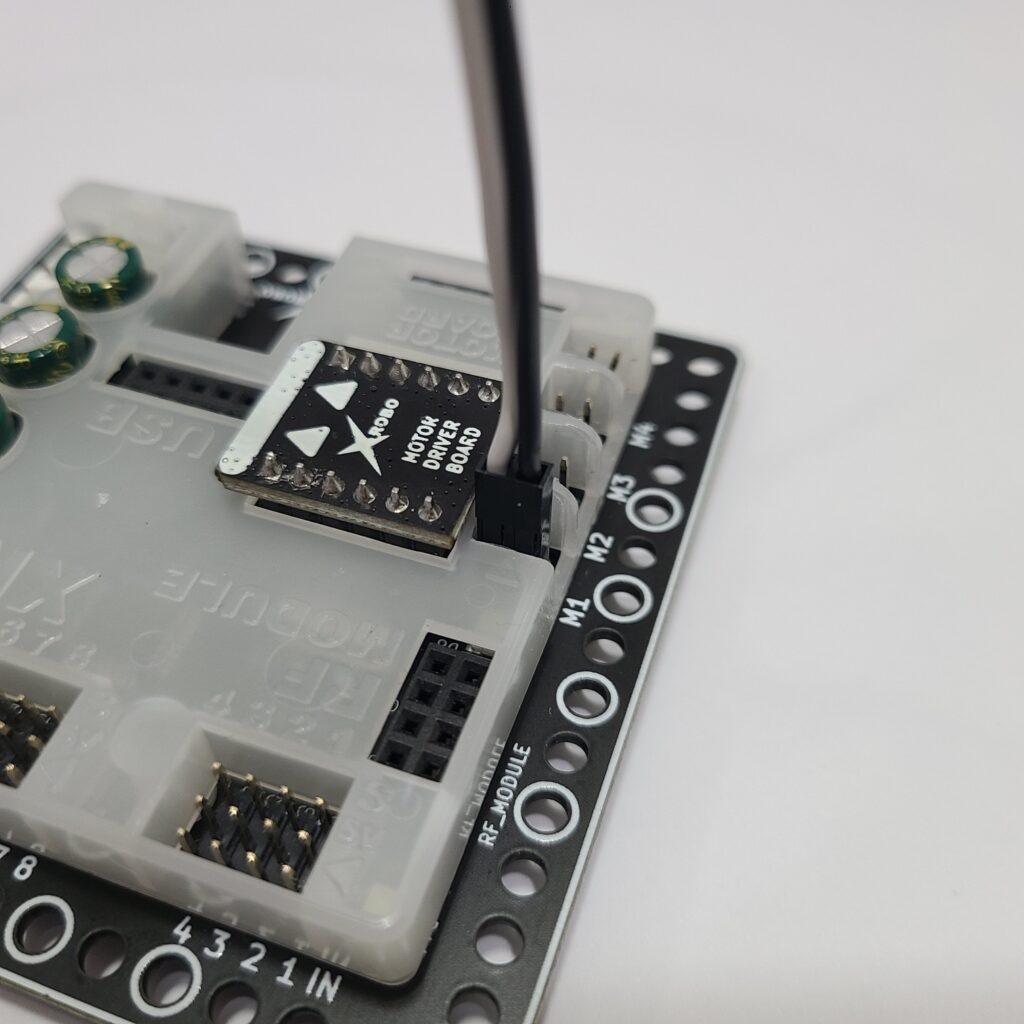
If the DC motor driver board is not inserted according to the assembly diagram, do not turn on the power. Insert it correctly as per the assembly diagram to avoid overheating risks during operation.
If the DC motor driver board is not inserted, place it properly and then turn on the power to check the operation.
Ensure that the shafts of the left and right DC motors are assembled to face downward. If the motor shafts are incorrectly assembled, the robot’s wheels will not touch the ground.