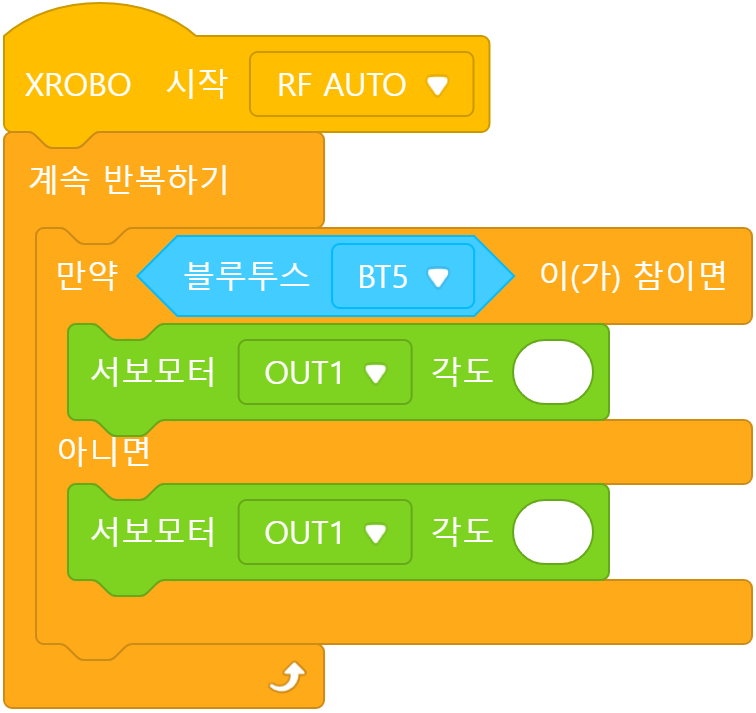
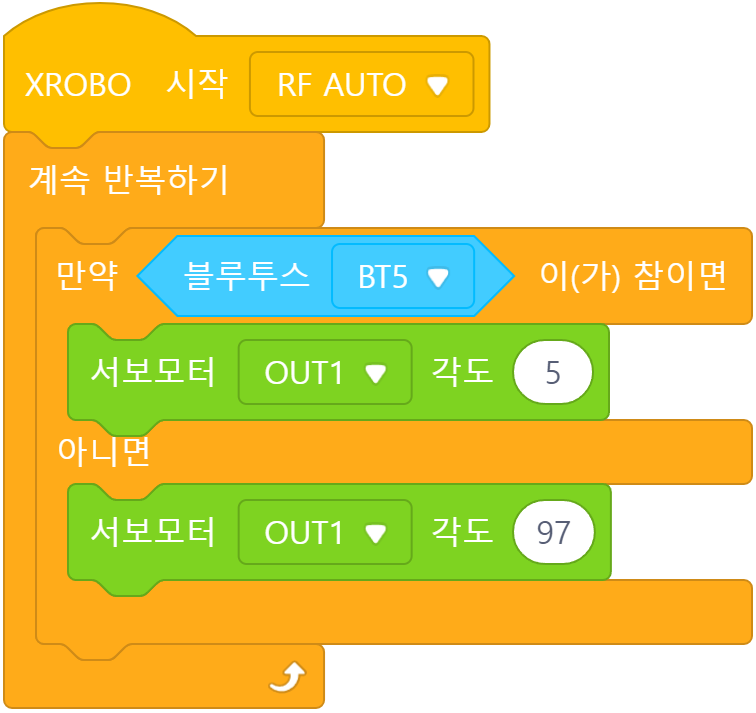
When button 5 is released: Lower the blade (servo motor angle 97)
Since the servo motor is connected to the OUT1 port, select ‘OUT1’ when choosing the port.
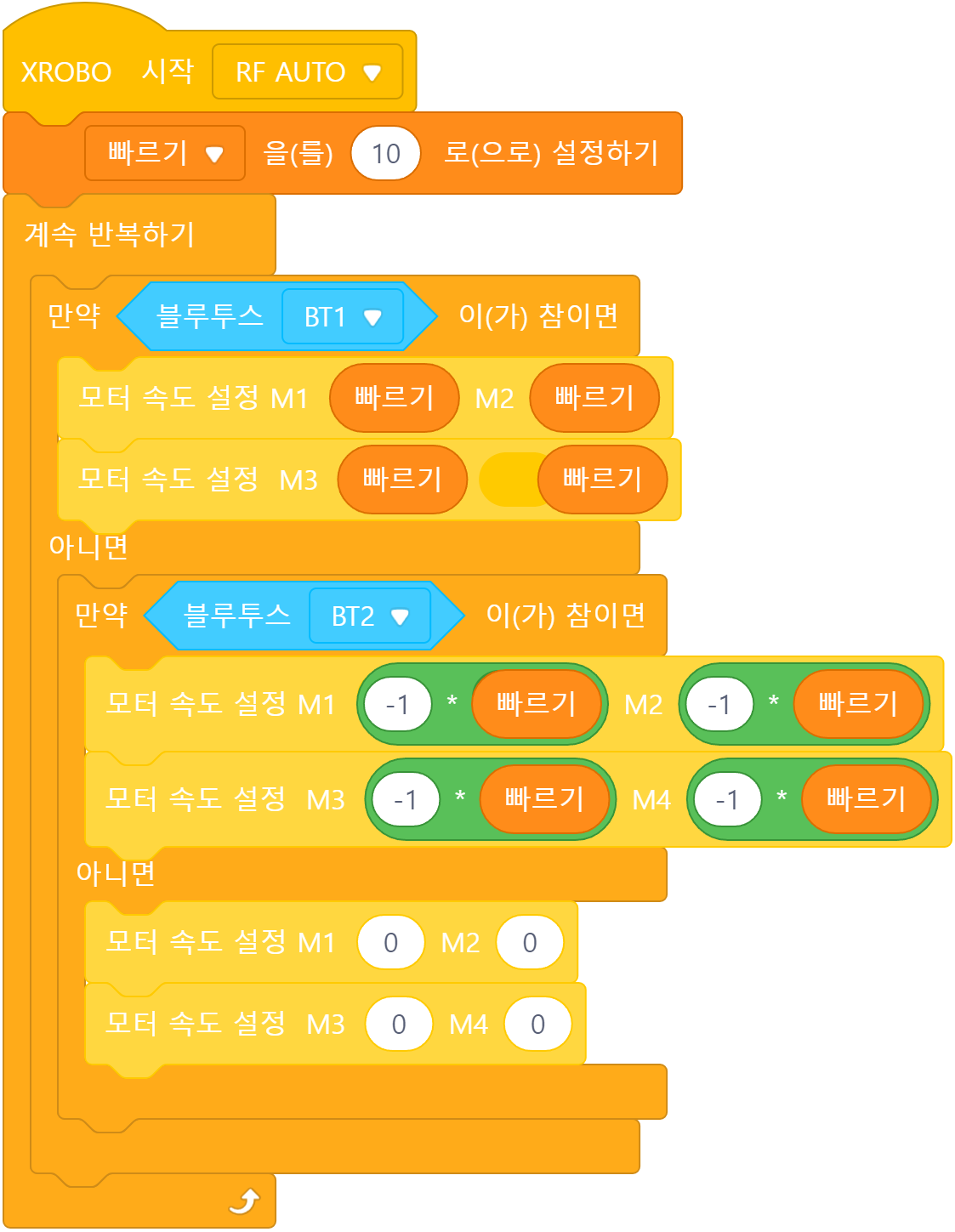
2) Changing Robot Speed Using a Variable
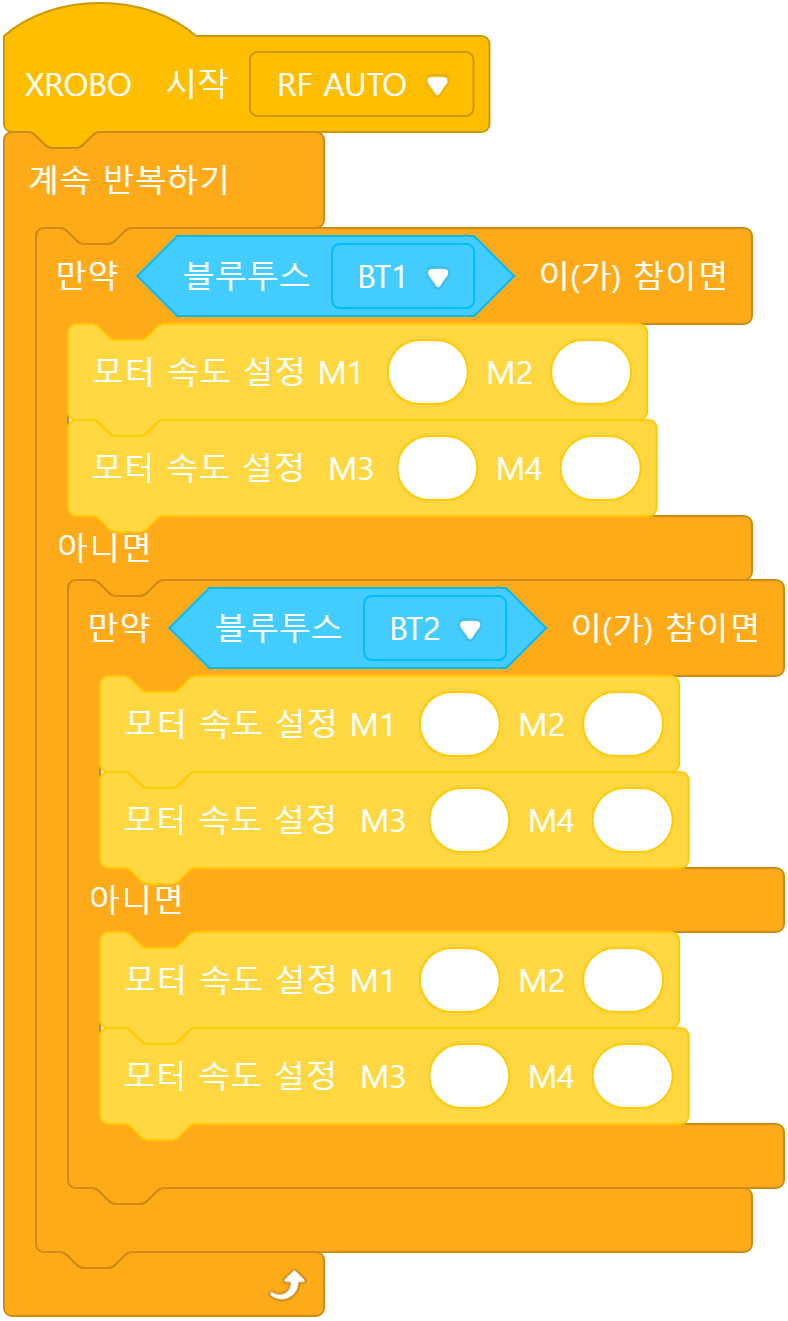
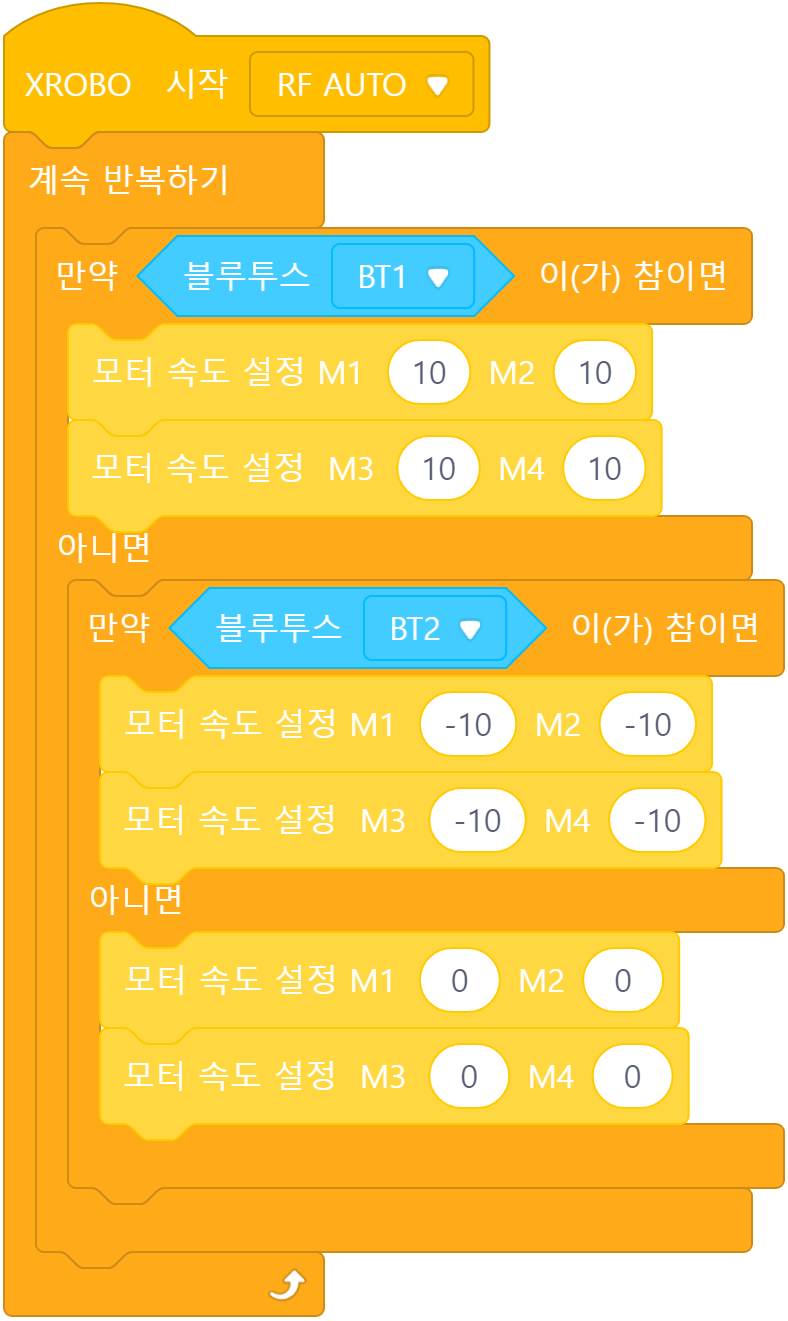
Using a Remote Control
button 1: Move Forward (Speed 10)
button 2: Move Backward (Speed 10)
When button 1-2 are released: Stop
Since the left wheels and legs are connected to M1 and M3, and the right wheels and legs are connected to M2 and M4, set the speeds of ‘M1~4’ appropriately.
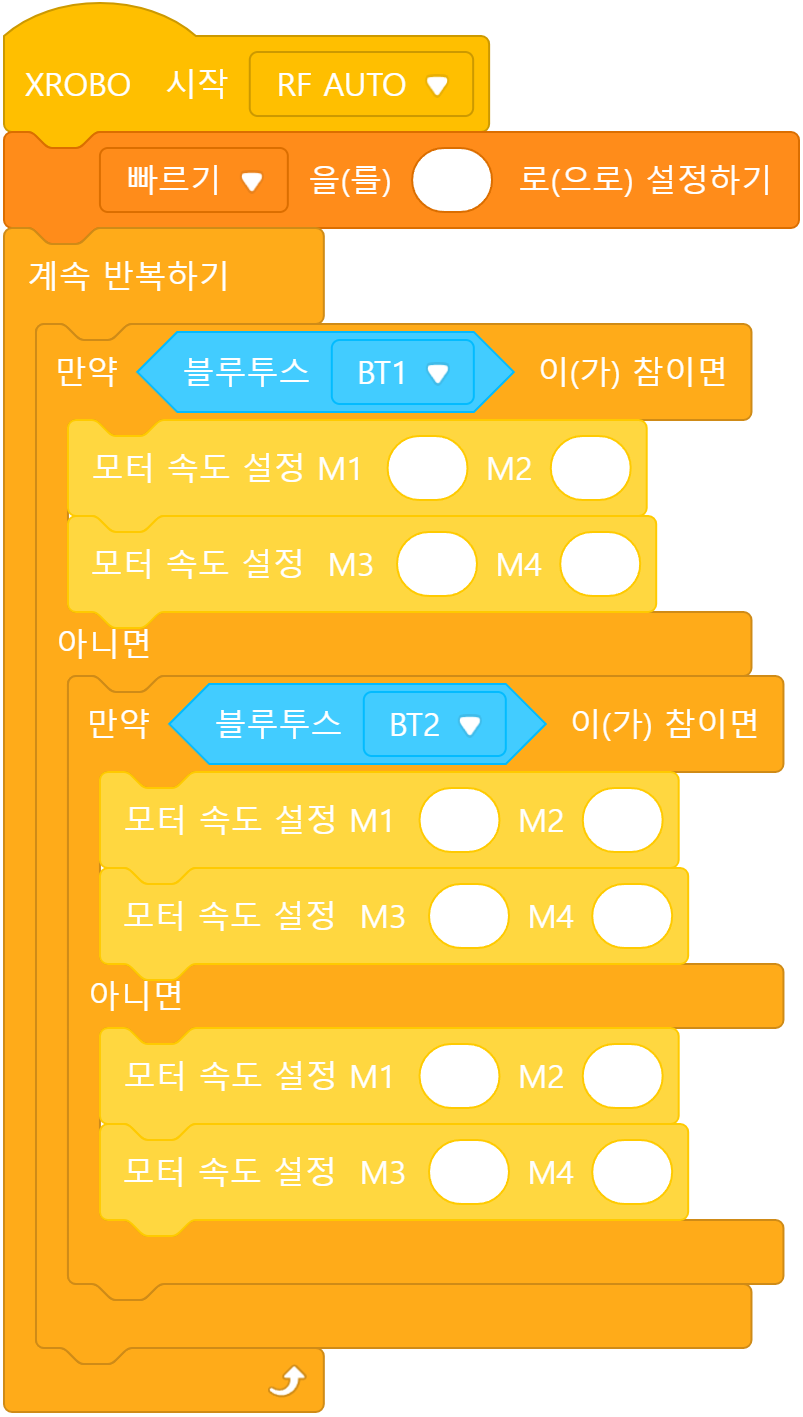
Creating and Using a Variable
Create a variable named ‘speed’ and set its initial value to 10. When holding down the remote buttons, the wheels should move according to the ‘speed’ variable.
button 1: Move Forward
button 2: Move Backward
When button 1-2 are released: Stop
To negate or remove the negative sign, use the multiplication (*) block and multiply by -1.
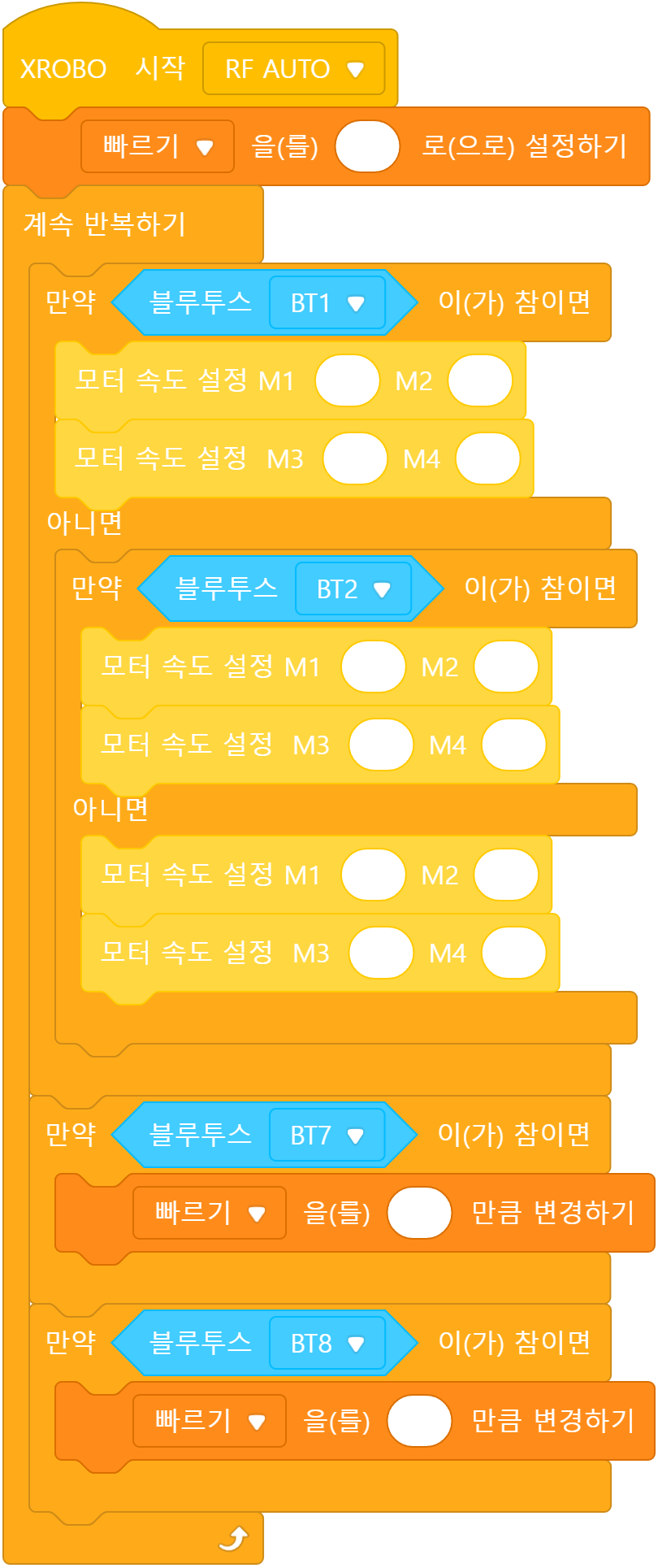
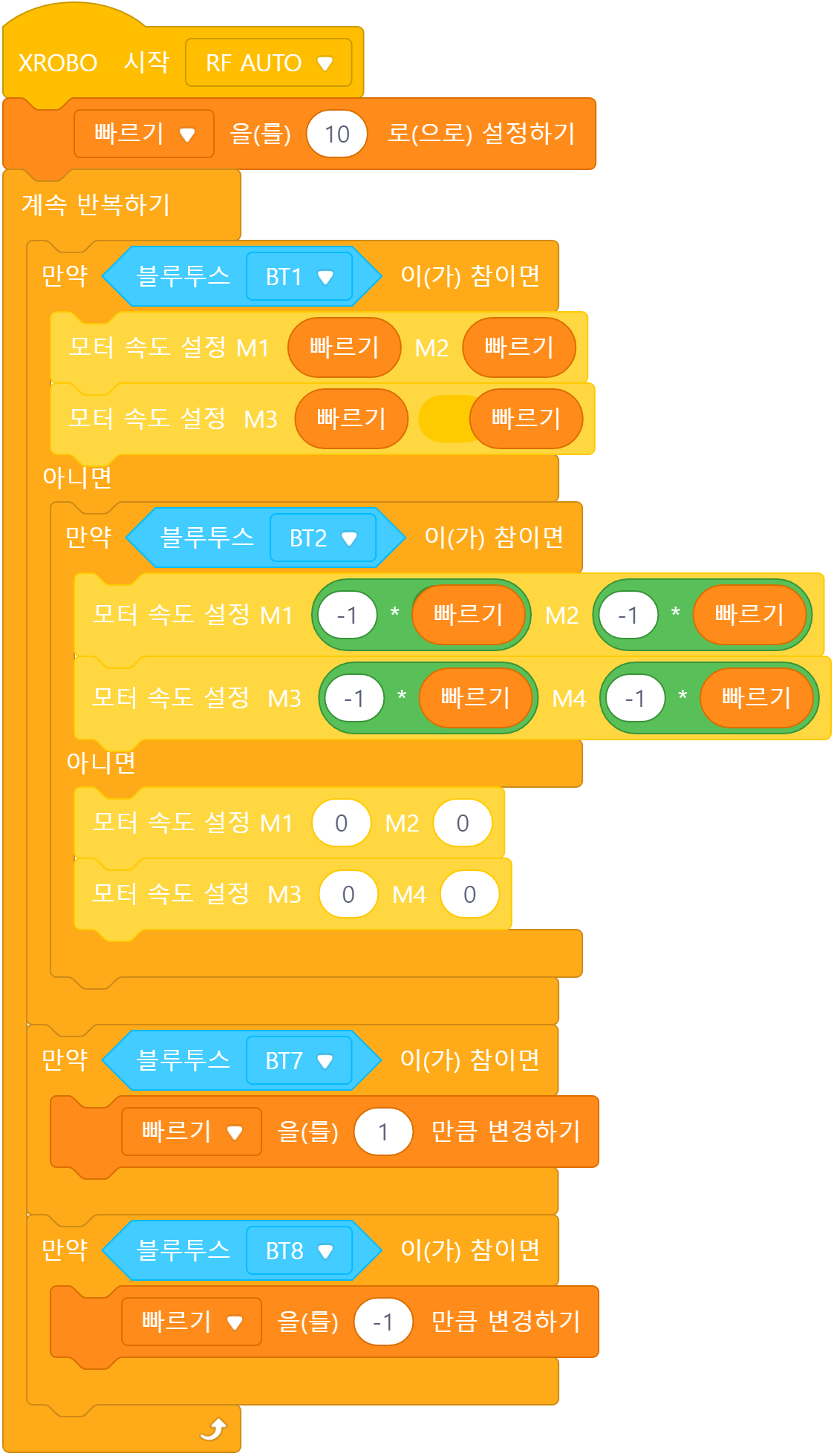
Using a Remote Control
Wheels
button 1: Move Forward
button 2: Move Backward
When button 1-2 are released: Stop
Speed Adjustment
Button 5: Increase the 'speed' variable by 1
Button 6: Decrease the 'speed' variable by 1
To increase or decrease the variable value, use the “Change Variable” block. Specifically, enter ‘1’ to increase and ‘-1’ to decrease the value.
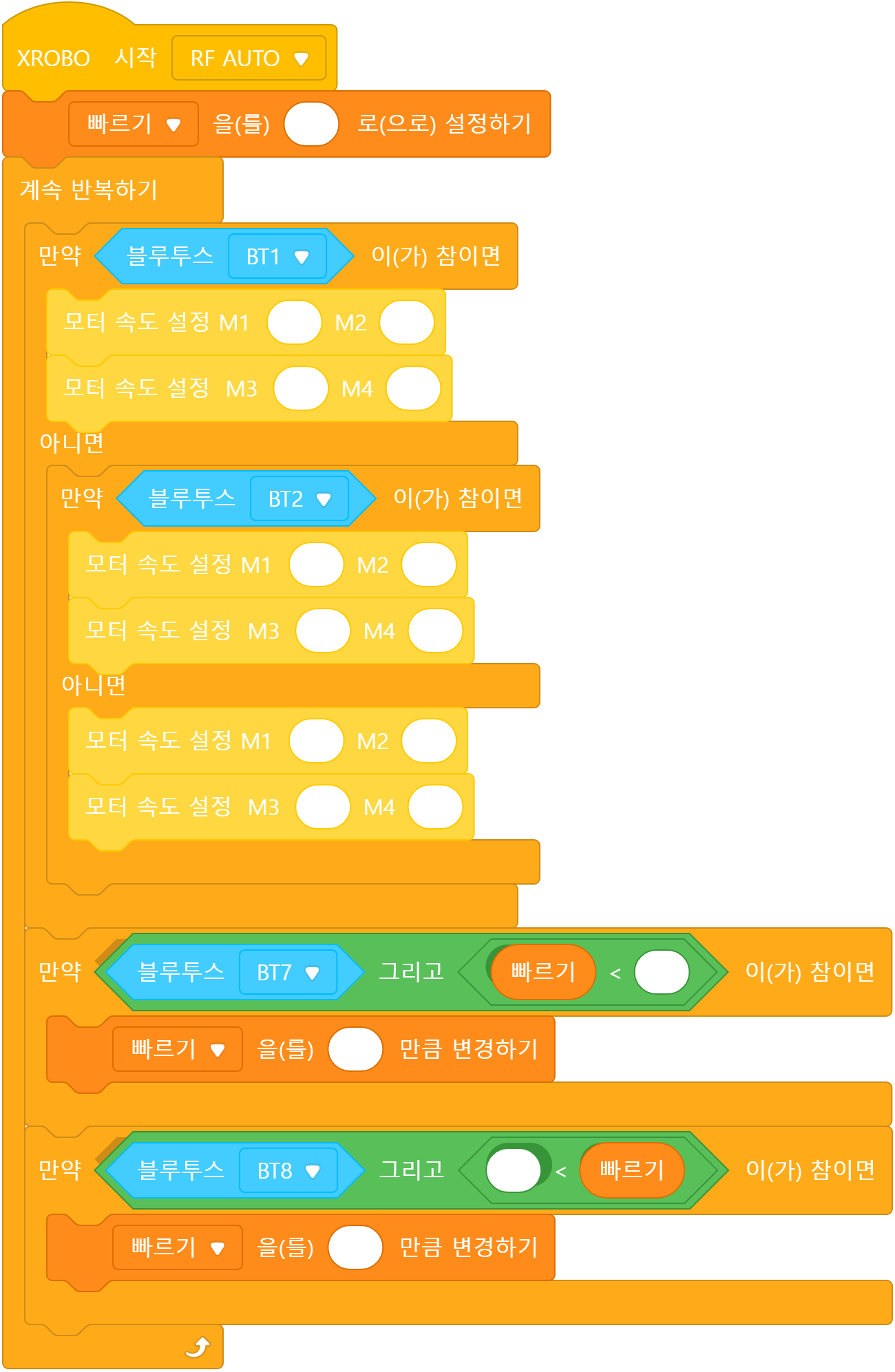
Limiting Value of a Variable
Wheels
button 1: Move Forward
button 2: Move Backward
When button 1-2 are released: Stop
Speed Adjustment
Button 5: Increase 'speed' by 1 if it's less than 20
Button 6: Decrease 'speed' by 1 if it's greater than 0
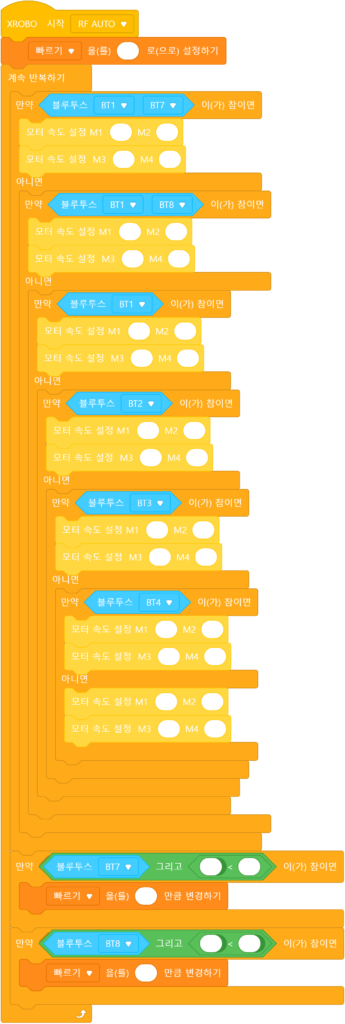
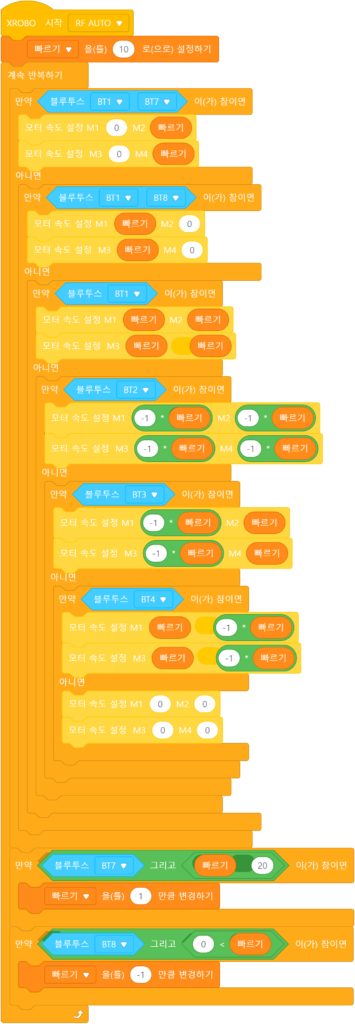
3) Controlling the Robot with the Remote
Using a Remote Control
Wheels
button 1: Move Forward
button 2: Move Backward
button 3: Turn Left in Place
button 4: Turn Right in Place
button 1 and 7: Left Curve Movement
button 1 and 8: Right Curve Movement
Blade
Button 5: Lift the blade (servo motor angle 5)
Speed Adjustment
Button 5: Increase 'speed' by 1 if it's less than 20
Button 6: Decrease 'speed' by 1 if it's greater than 0
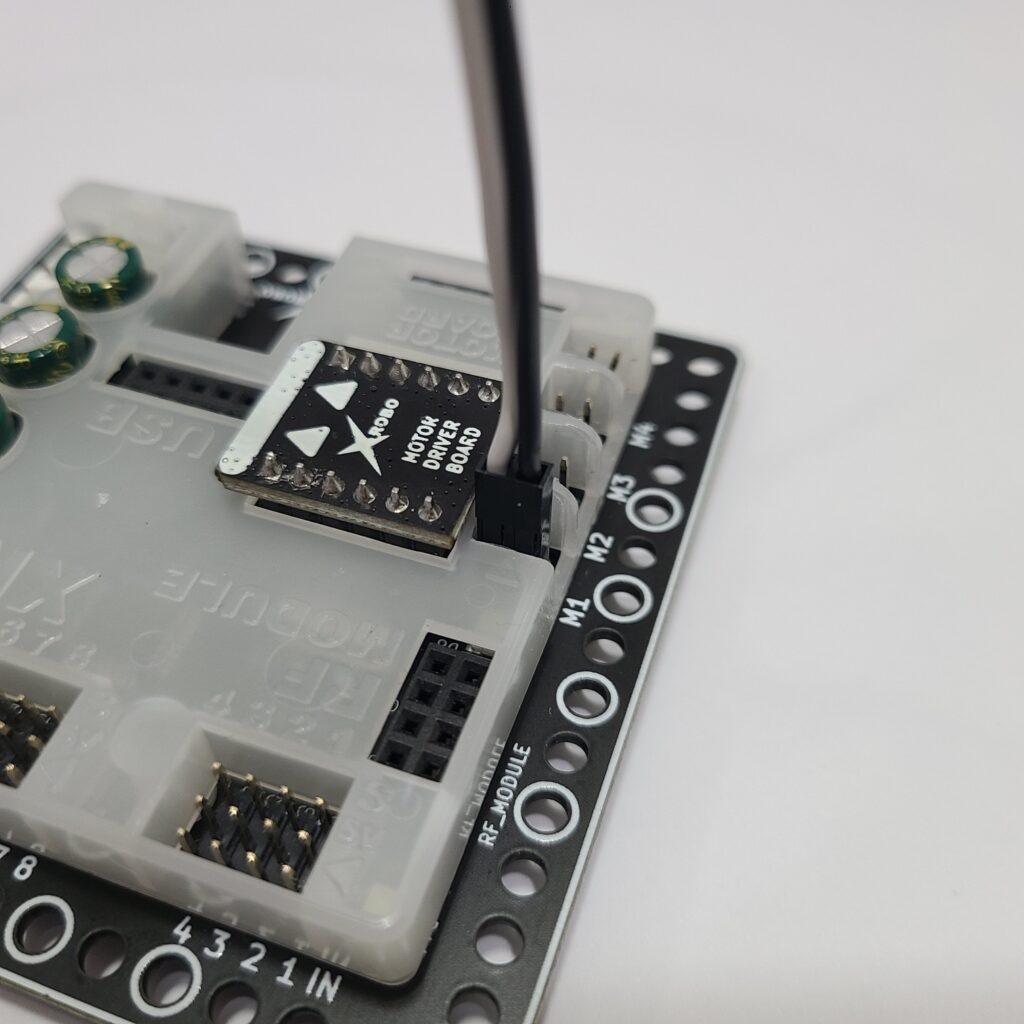
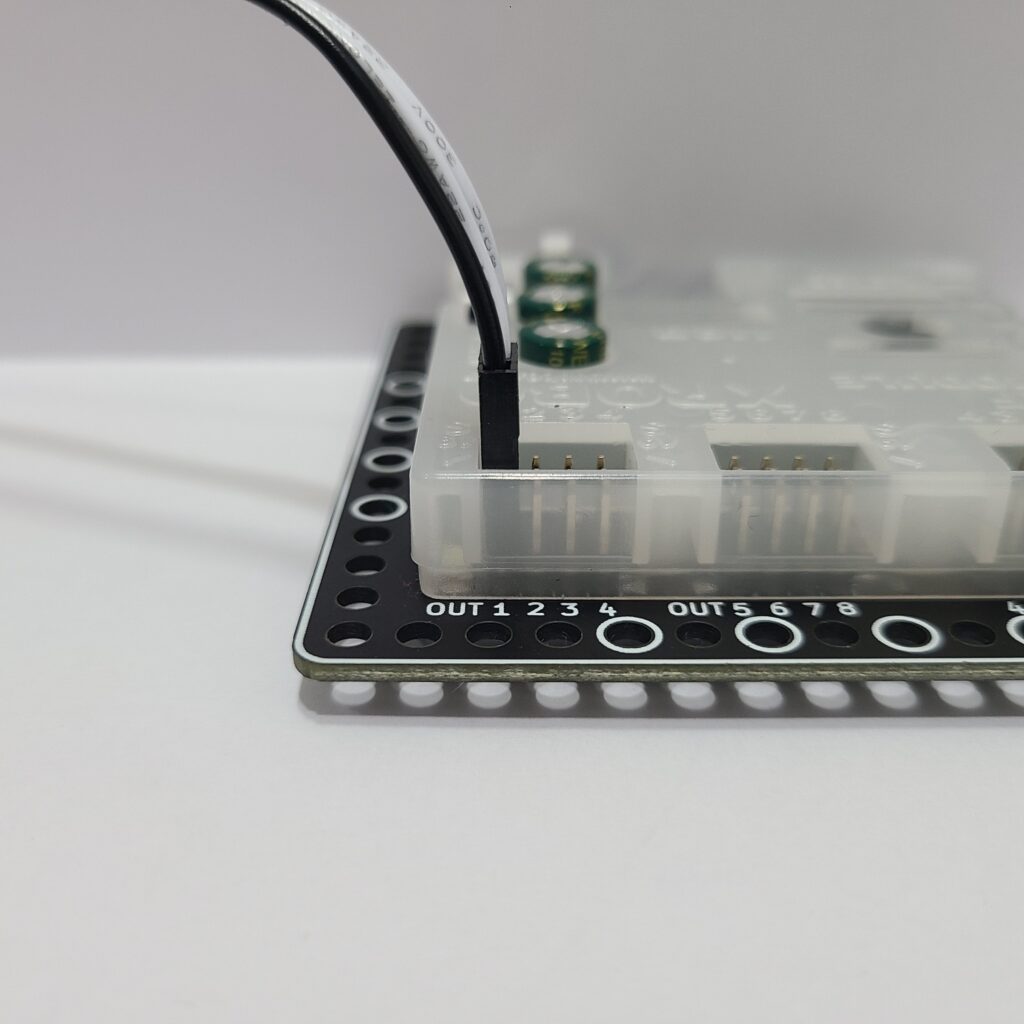
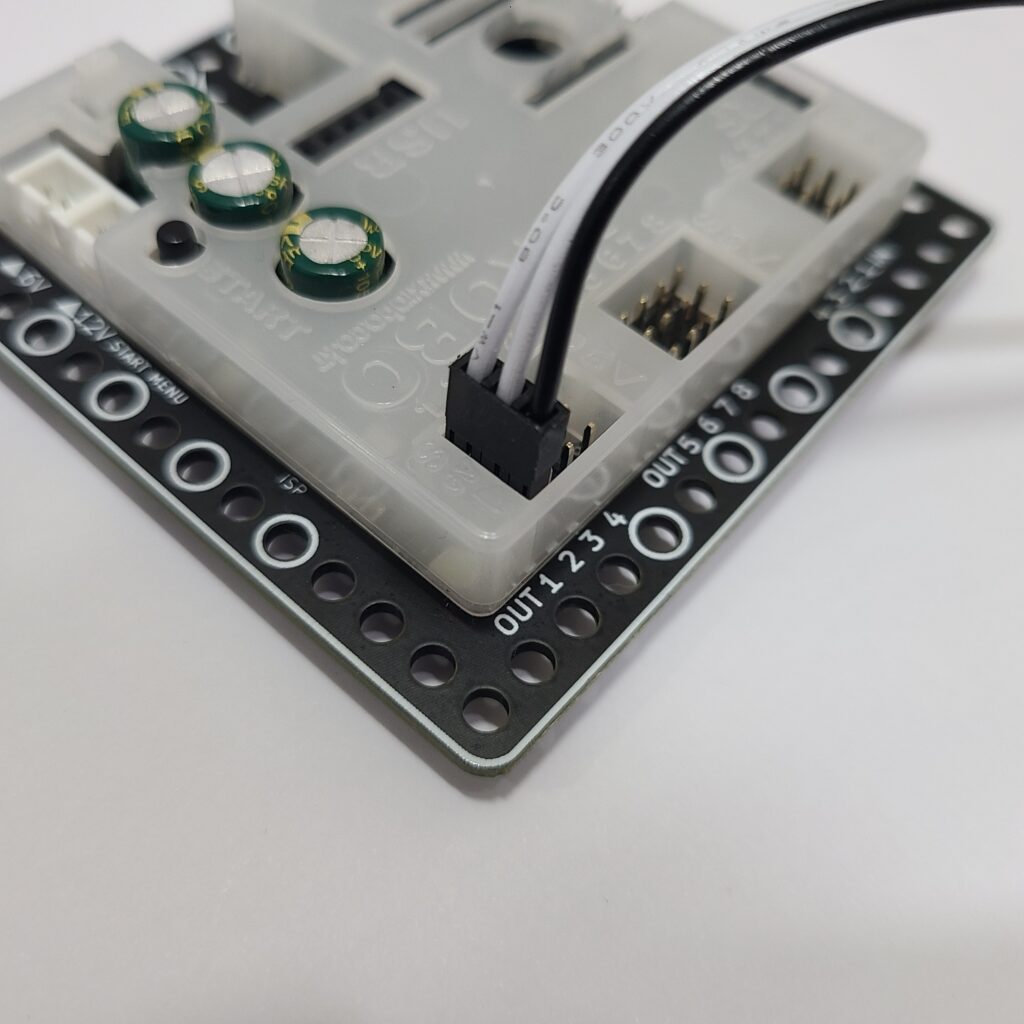
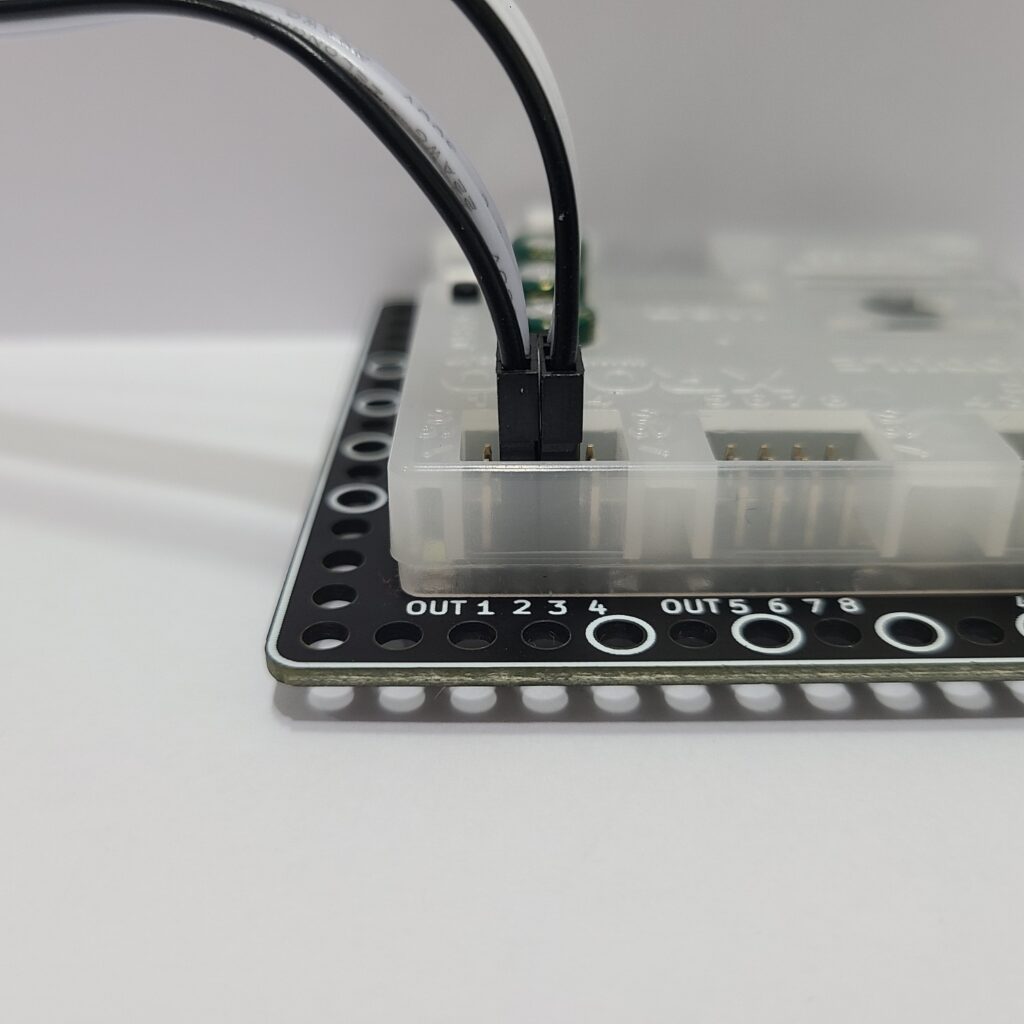
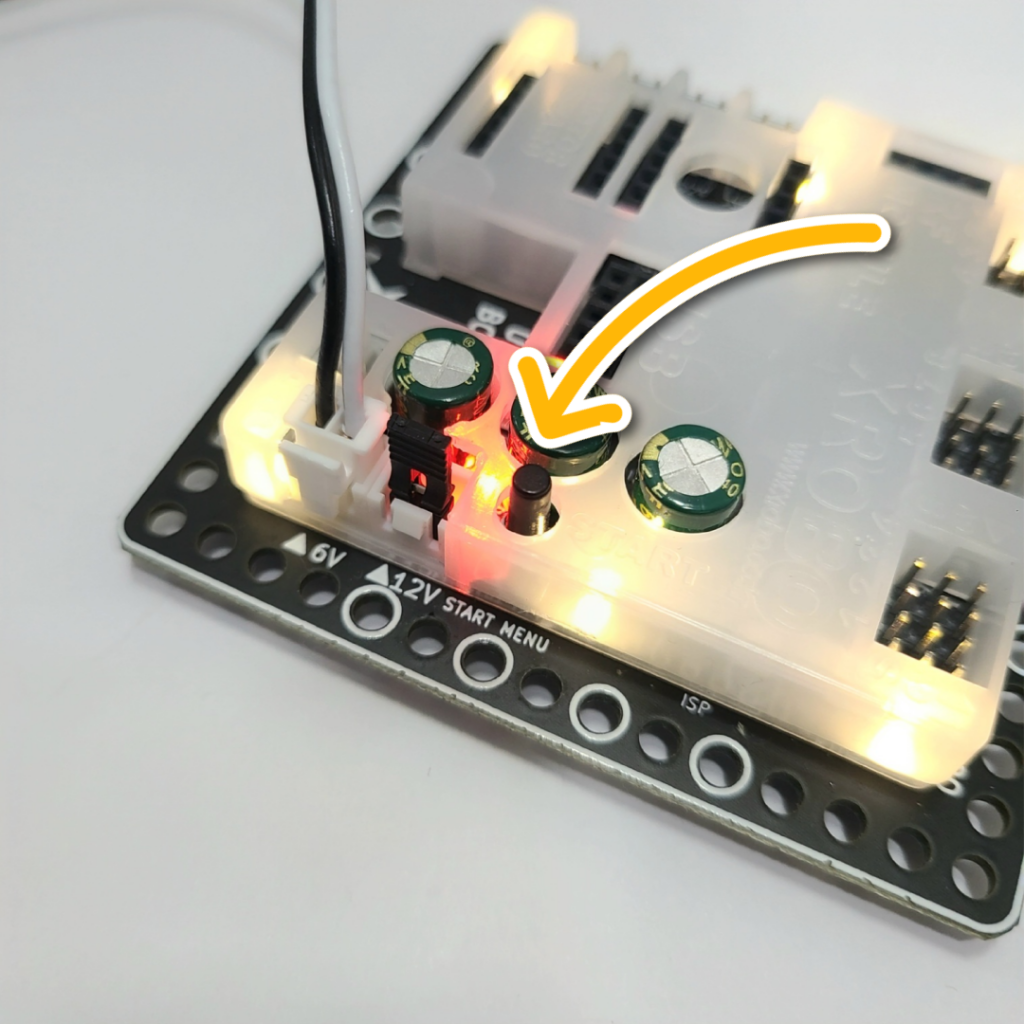
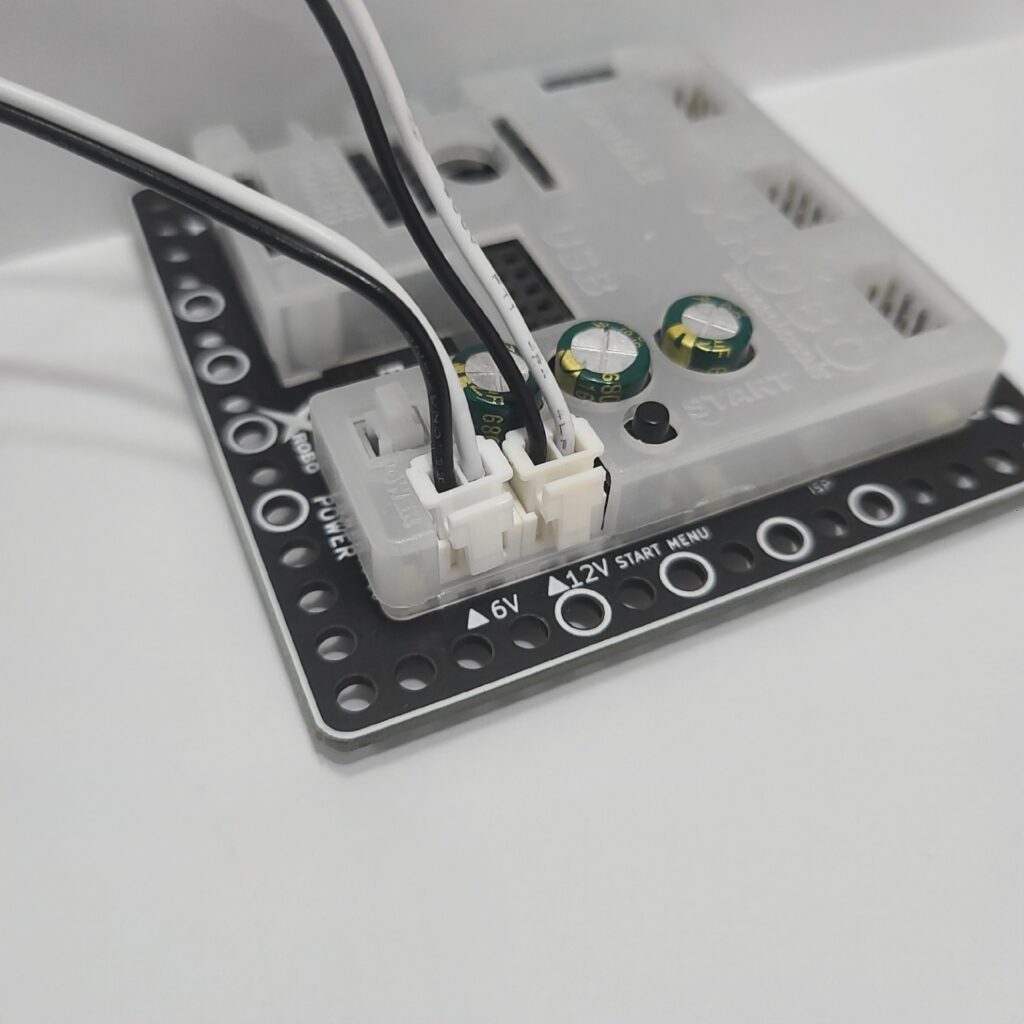
Confirm that the motor cables are inserted vertically into the motor ports on the CPU board. If connected horizontally, the motor may not rotate.
Ensure the black wire of the motor cable is aligned with the arrow on the CPU board case. If connected in reverse, the DC motor will rotate in the opposite direction.
If the DC motor driver board is not inserted according to the assembly diagram, do not turn on the power. Insert it correctly as per the assembly diagram to avoid overheating risks during operation.
If the DC motor driver board is not inserted, place it properly and then turn on the power to check the operation.
4) When the Servo Motor is Not Functioning Properly
Ensure that the direction of the servo motor label in the assembled robot matches the assembly diagram. If the label is oriented incorrectly, the servo motor may operate in reverse, or the angle may be incorrect, posing a risk of gear damage.
Ensure that the direction of the DC motor shaft in the assembled robot matches the assembly diagram. Incorrect assembly of the motor shaft may cause the robot wheels to get stuck on the frame and malfunction.







![M1 [2개], M2 [2개], M3, M4 포트에 연결](https://xrobo.co.kr/wp-content/uploads/2024/07/solution-motorconnection-112234-1024x1024.jpg)