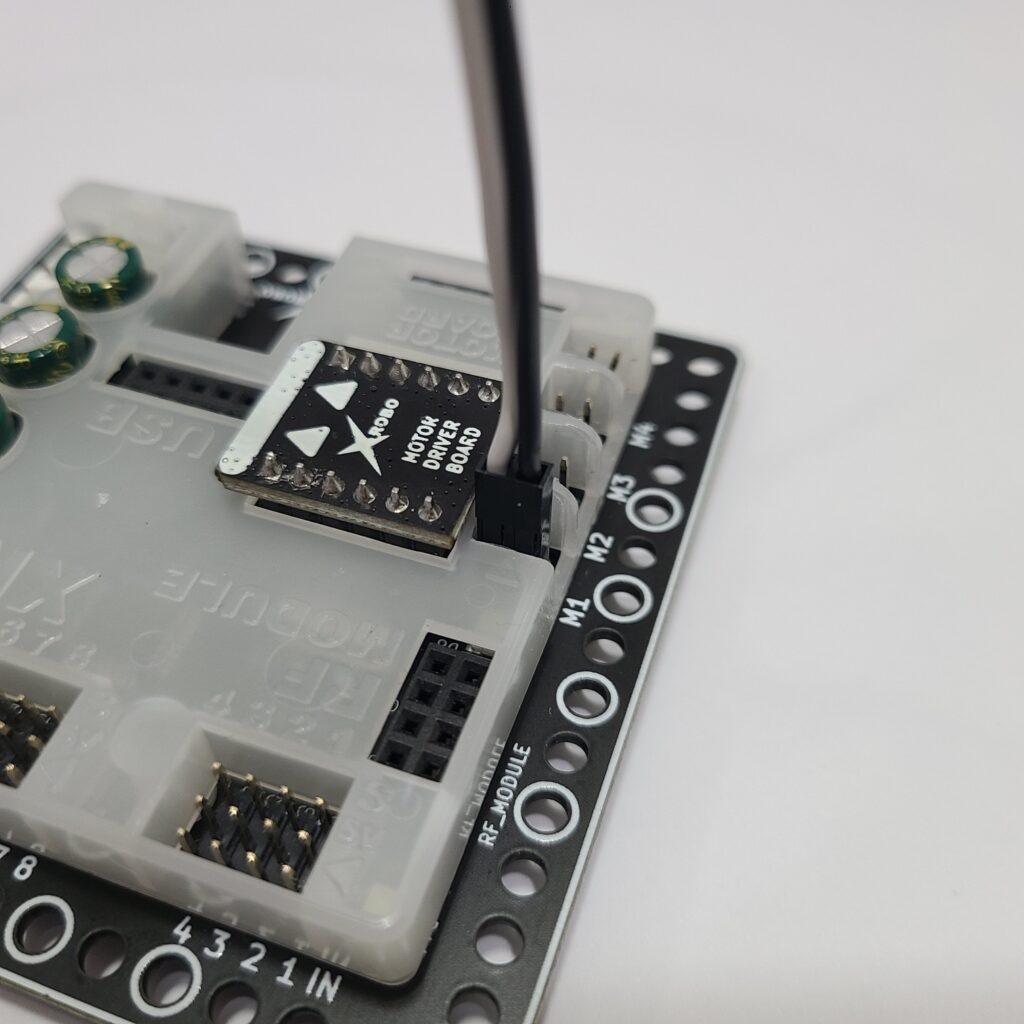
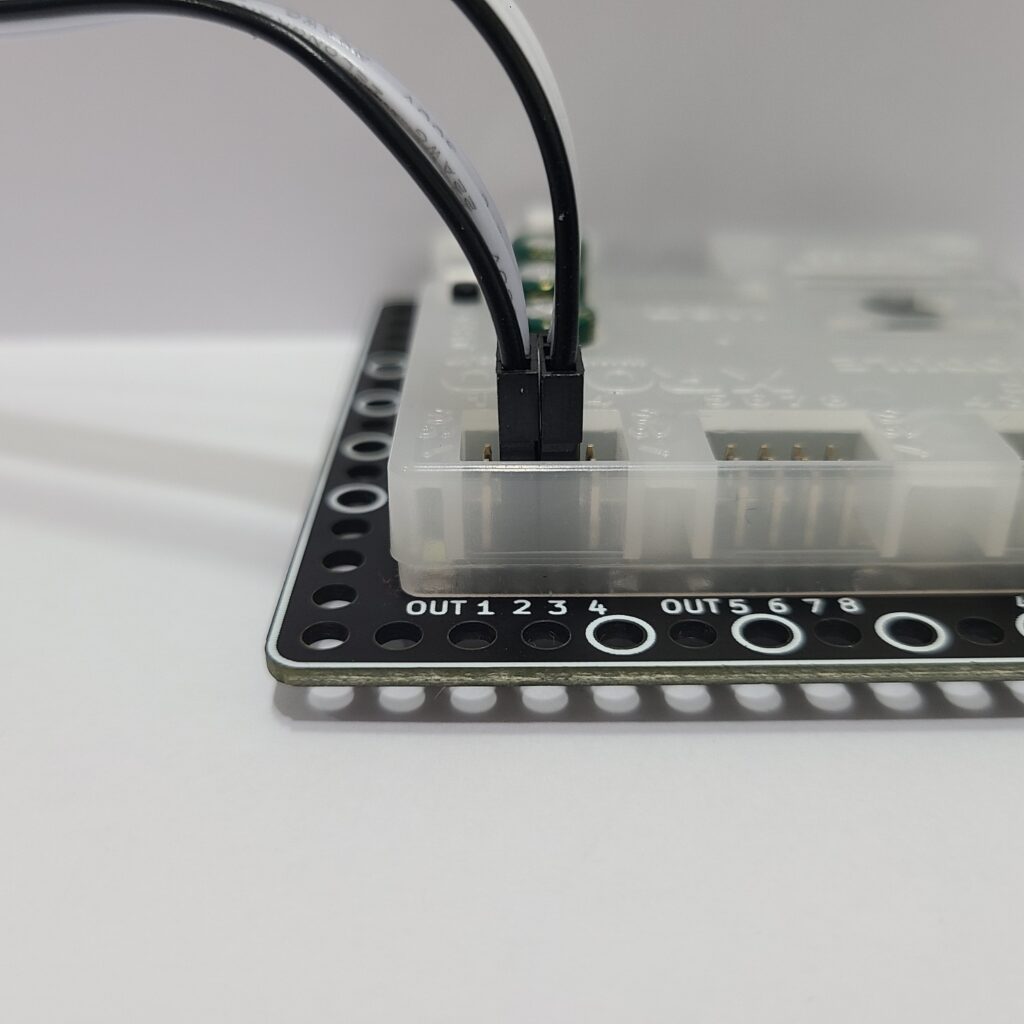
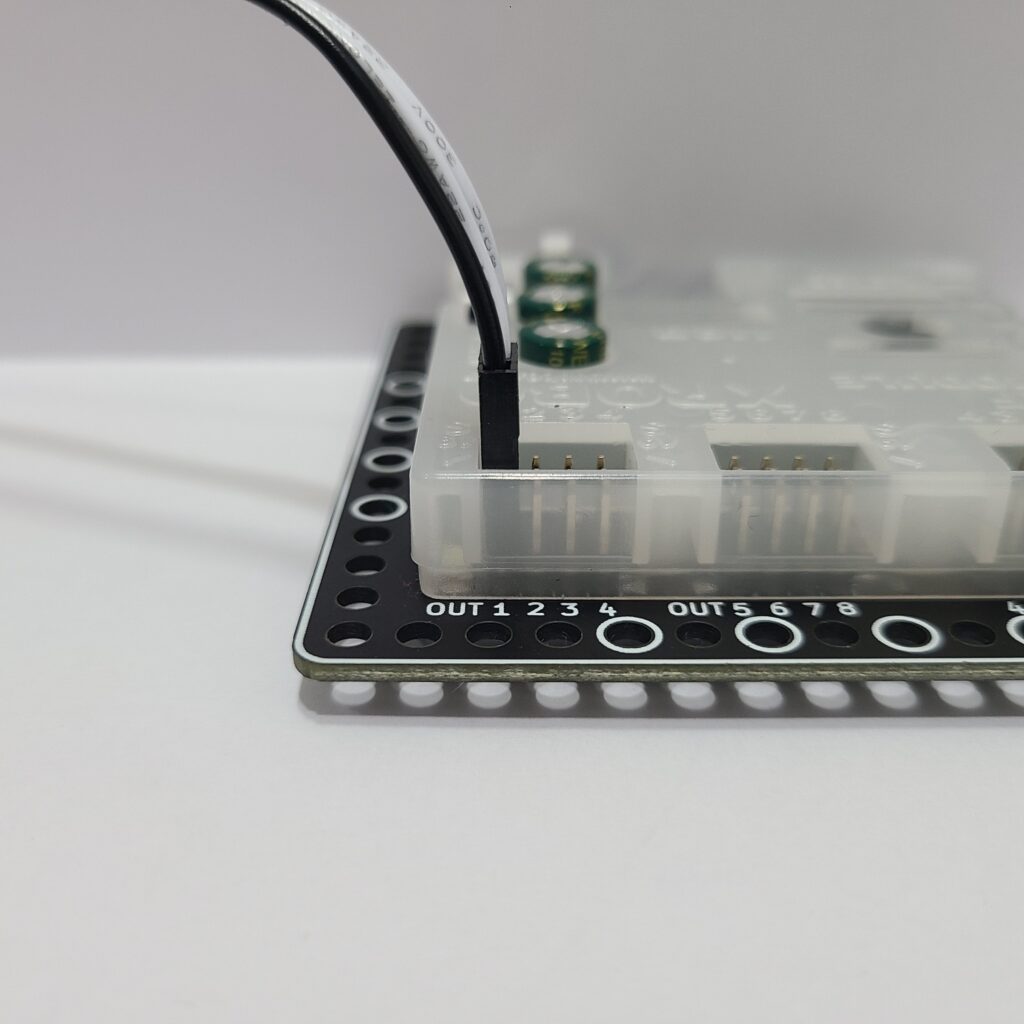
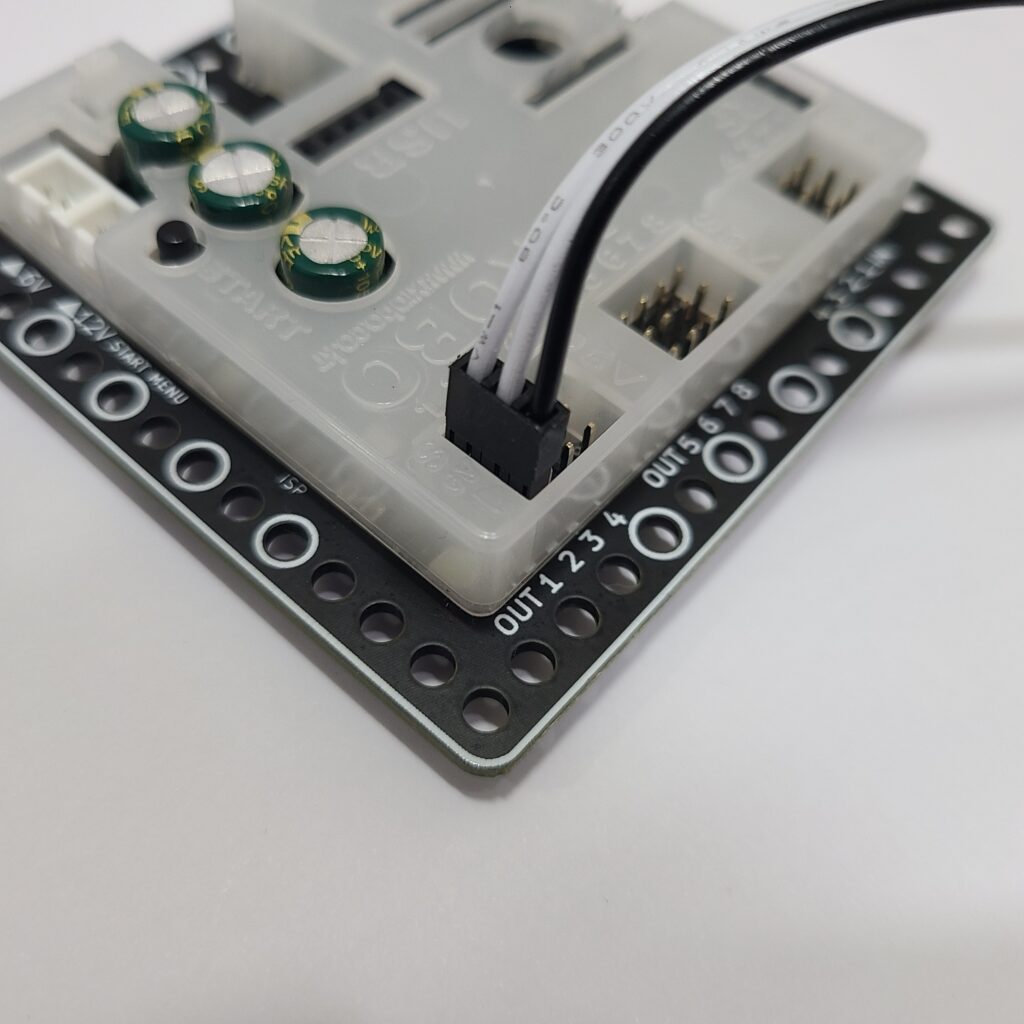
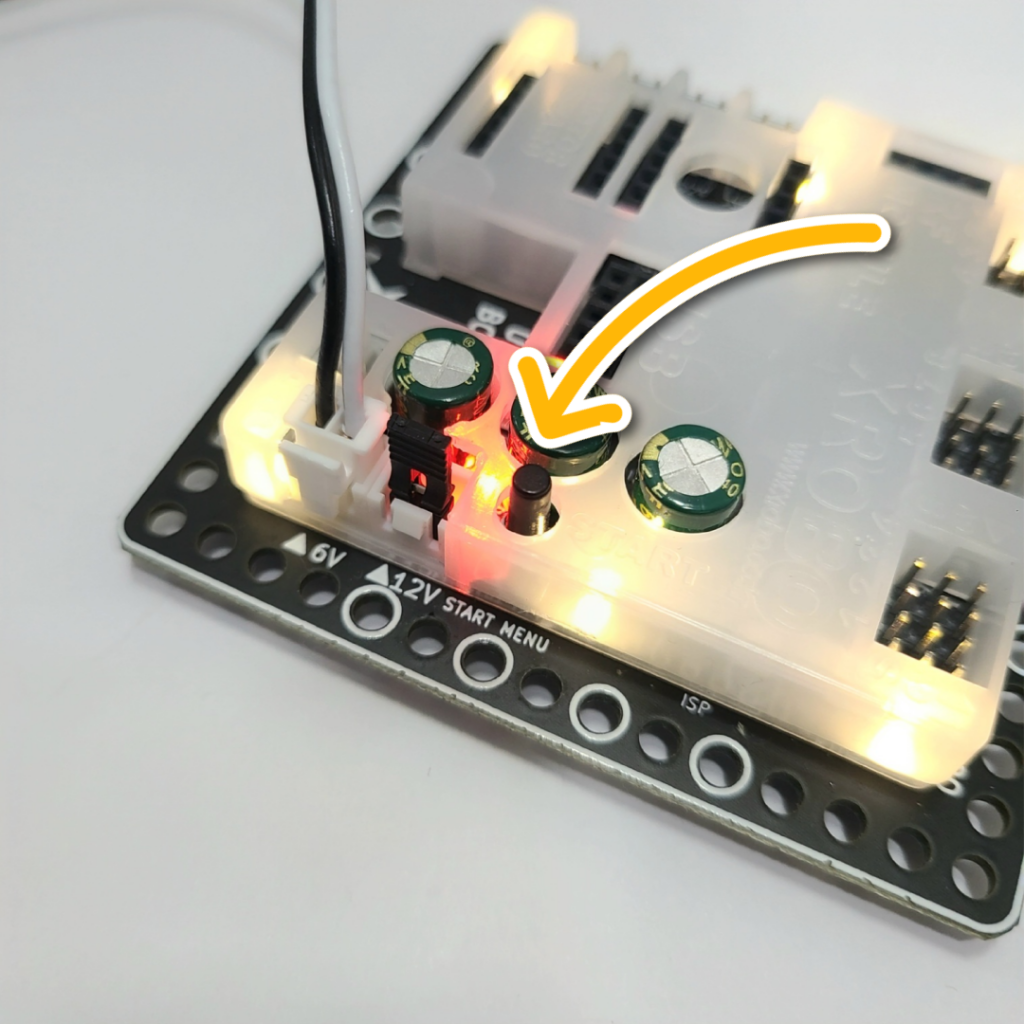
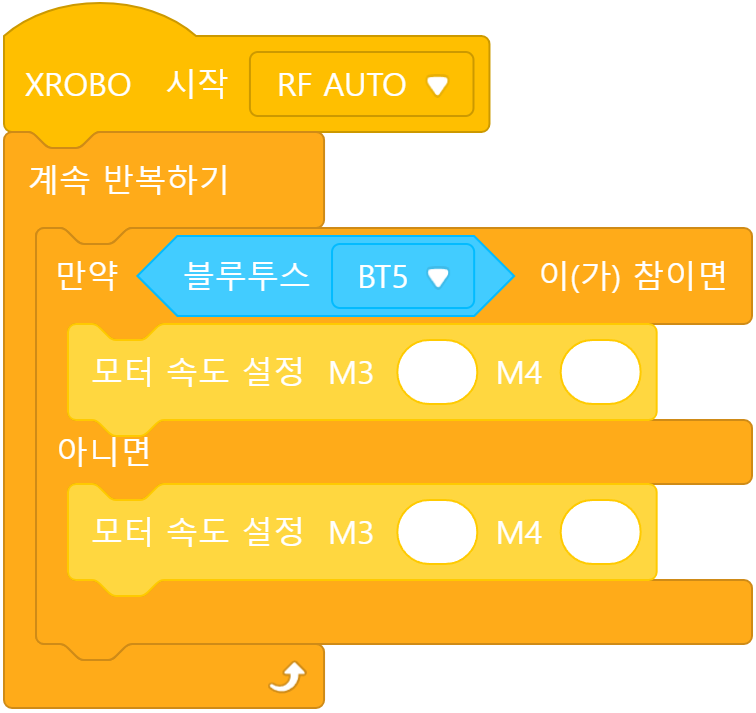
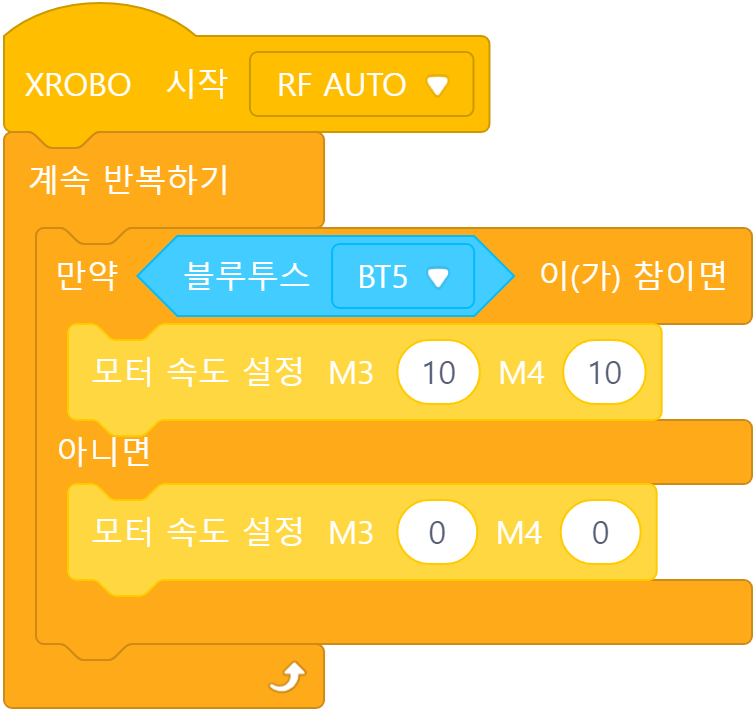
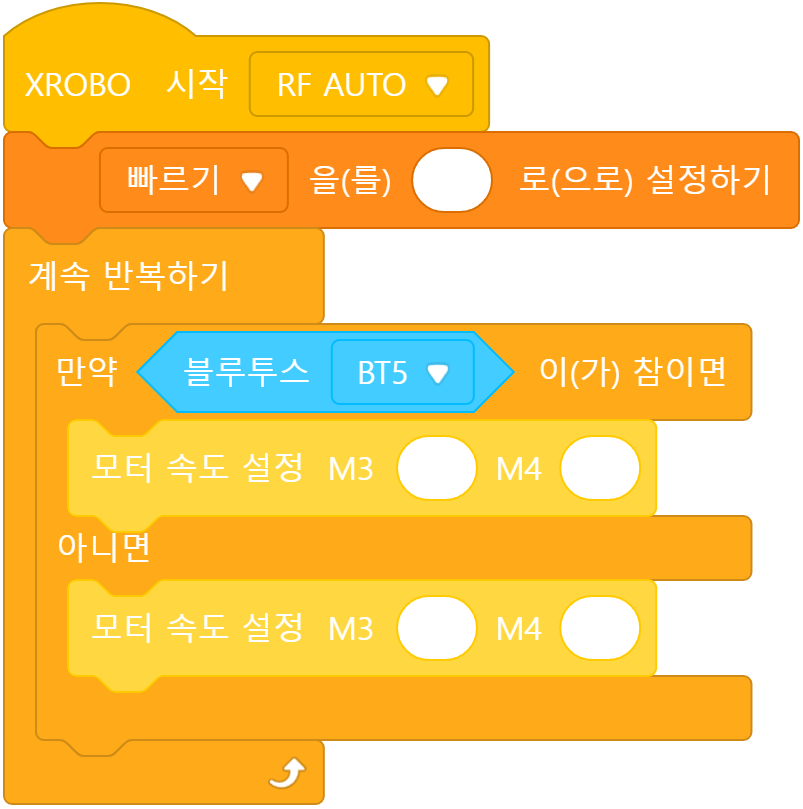
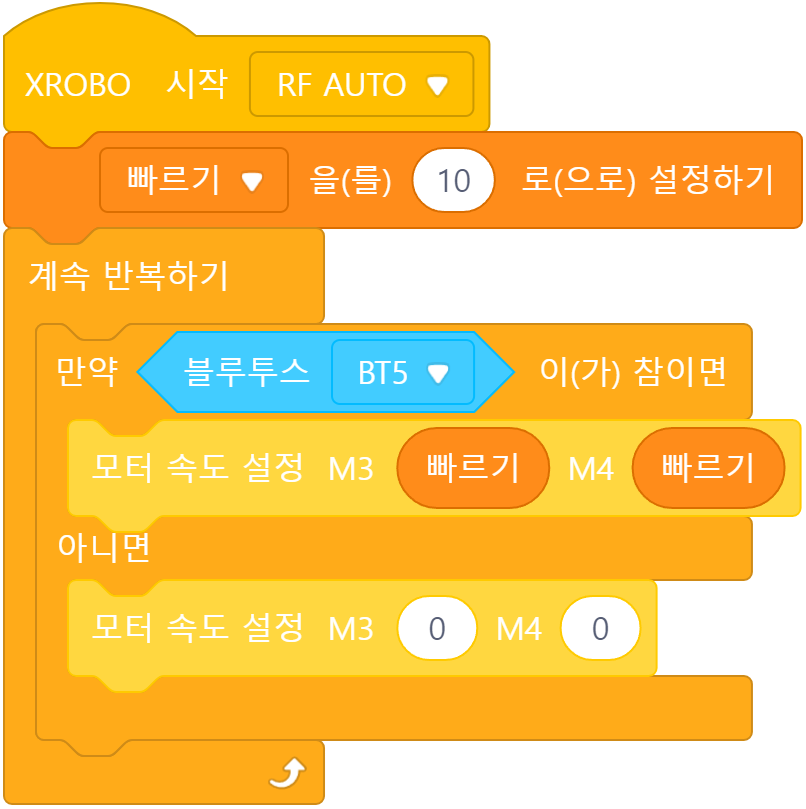
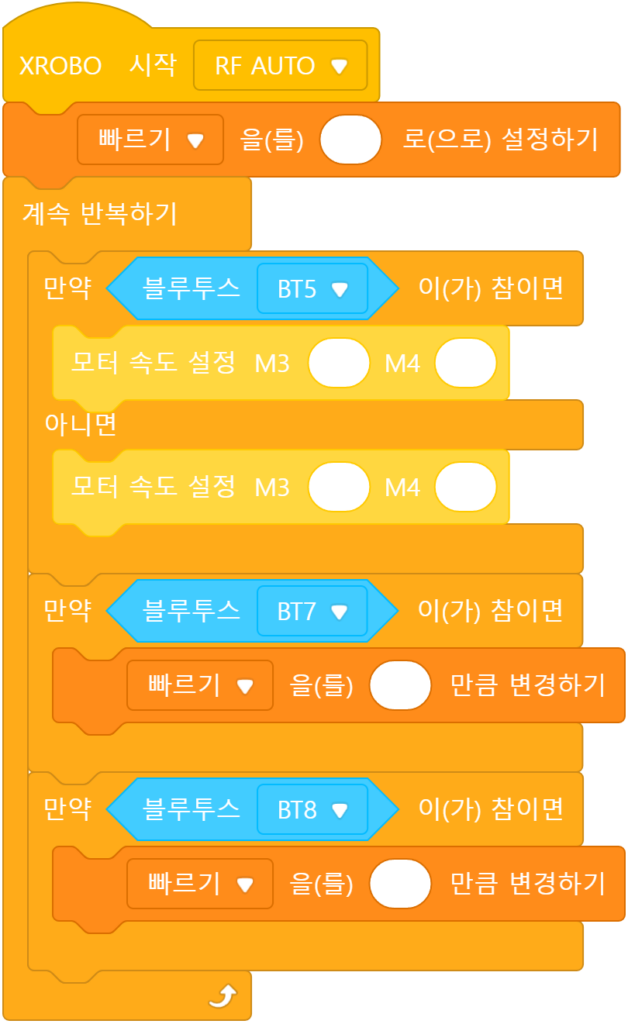
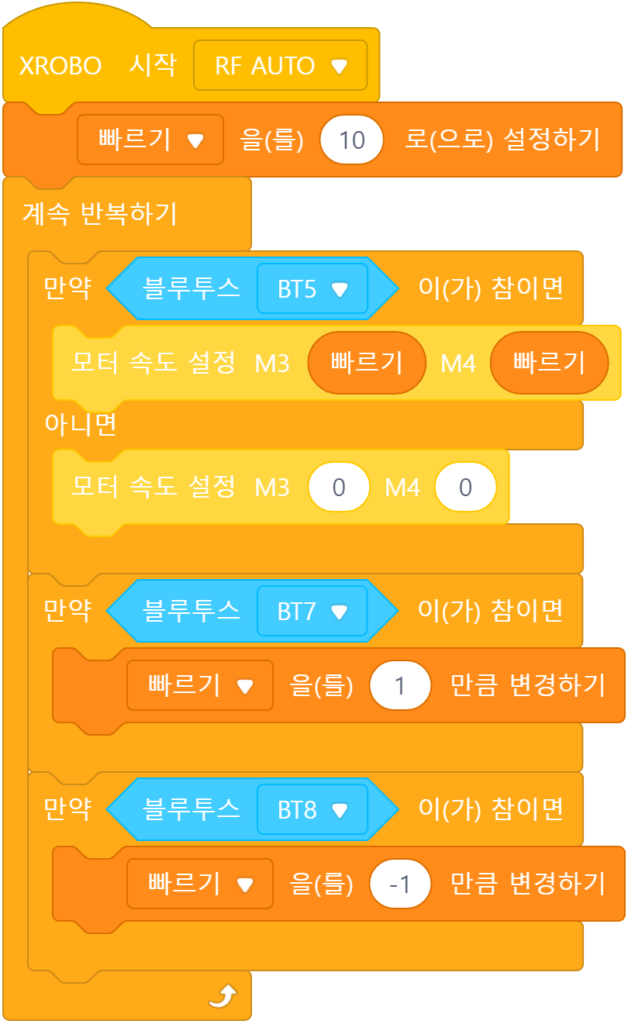
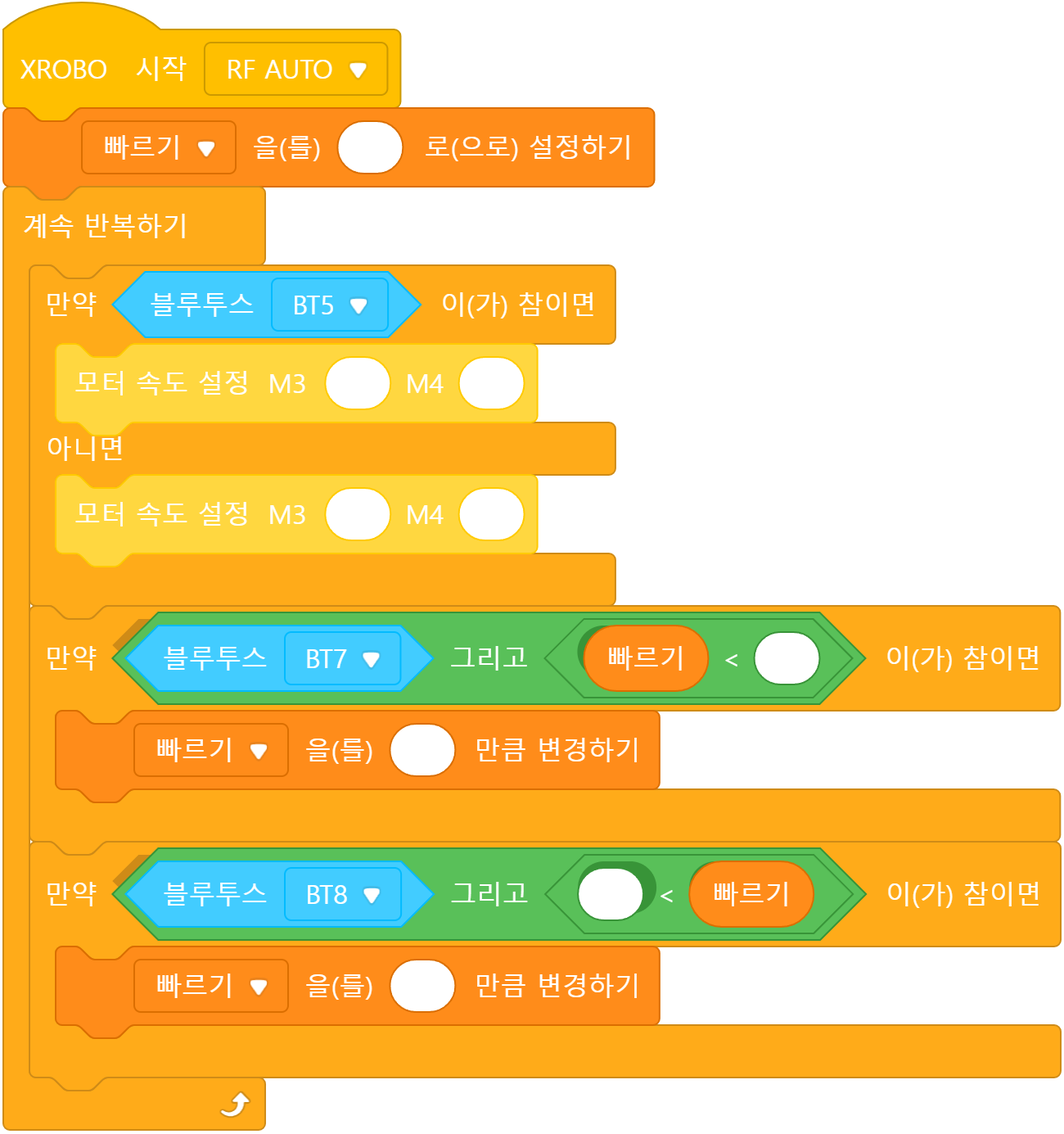
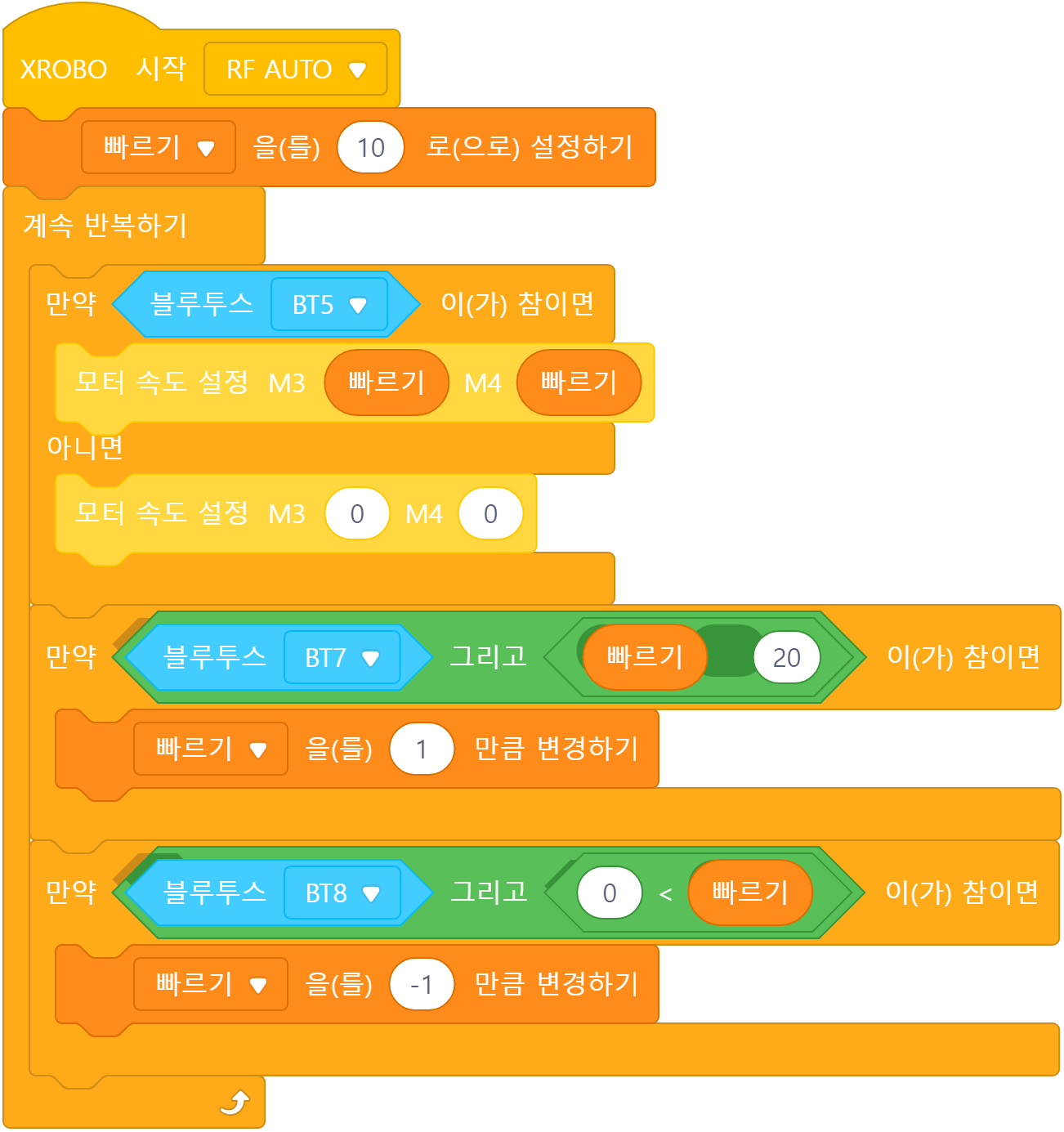
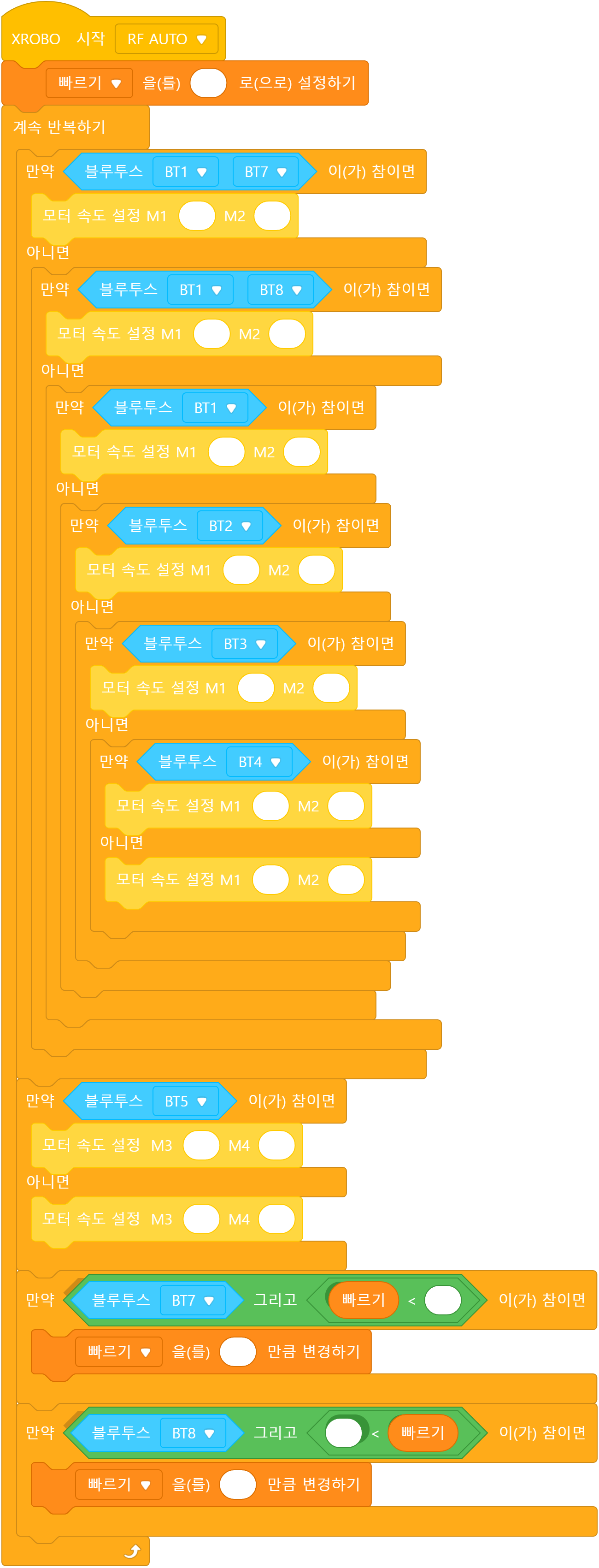
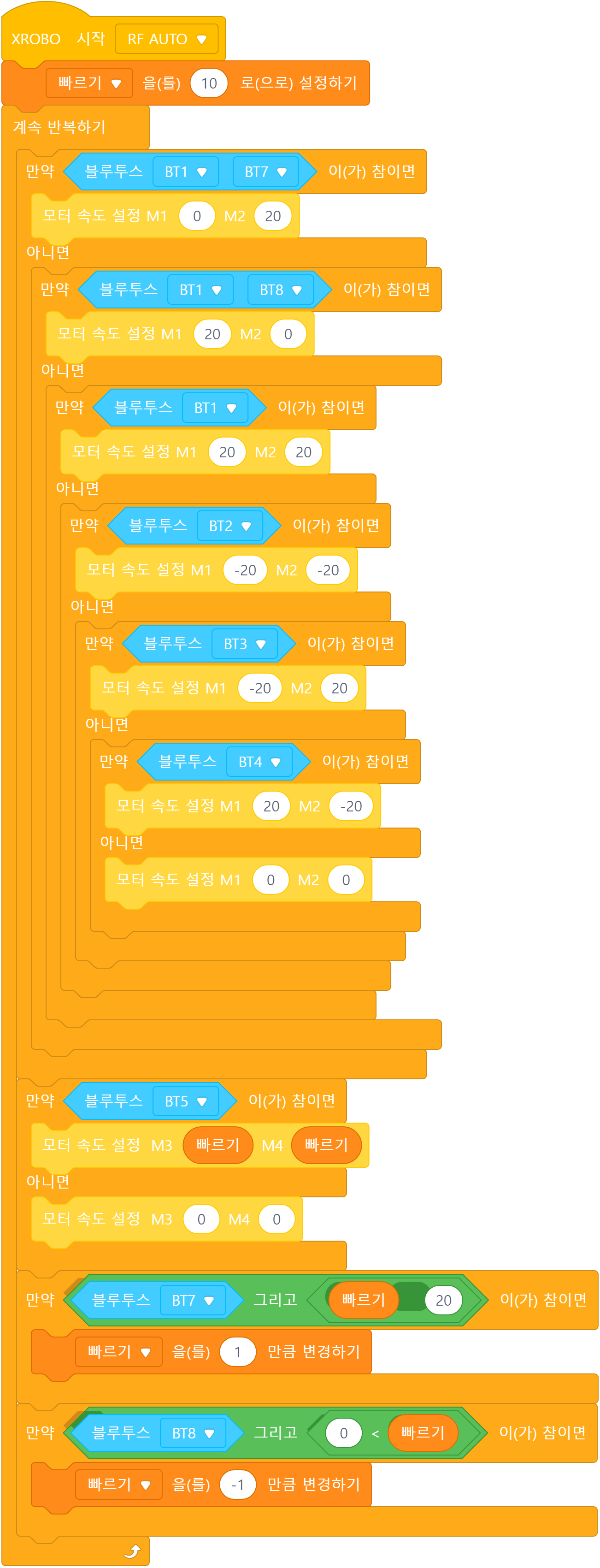
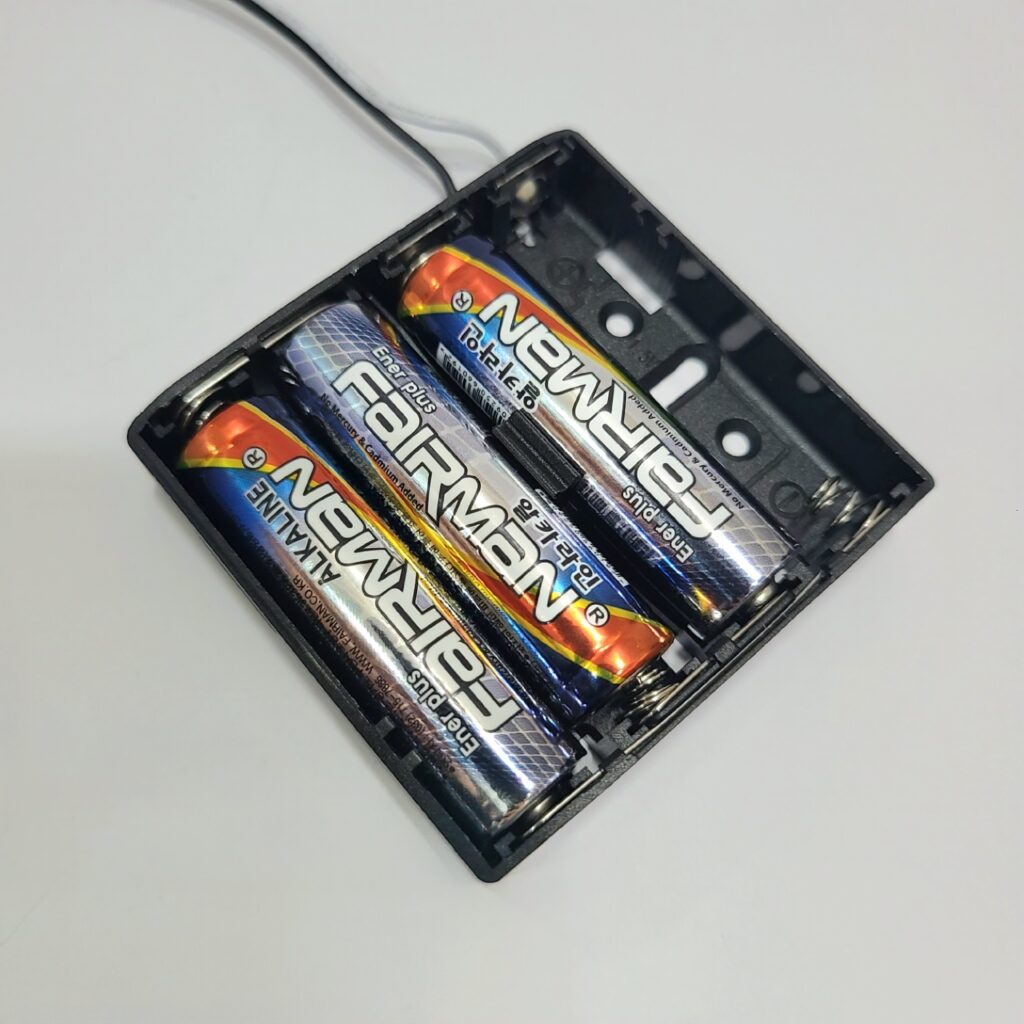
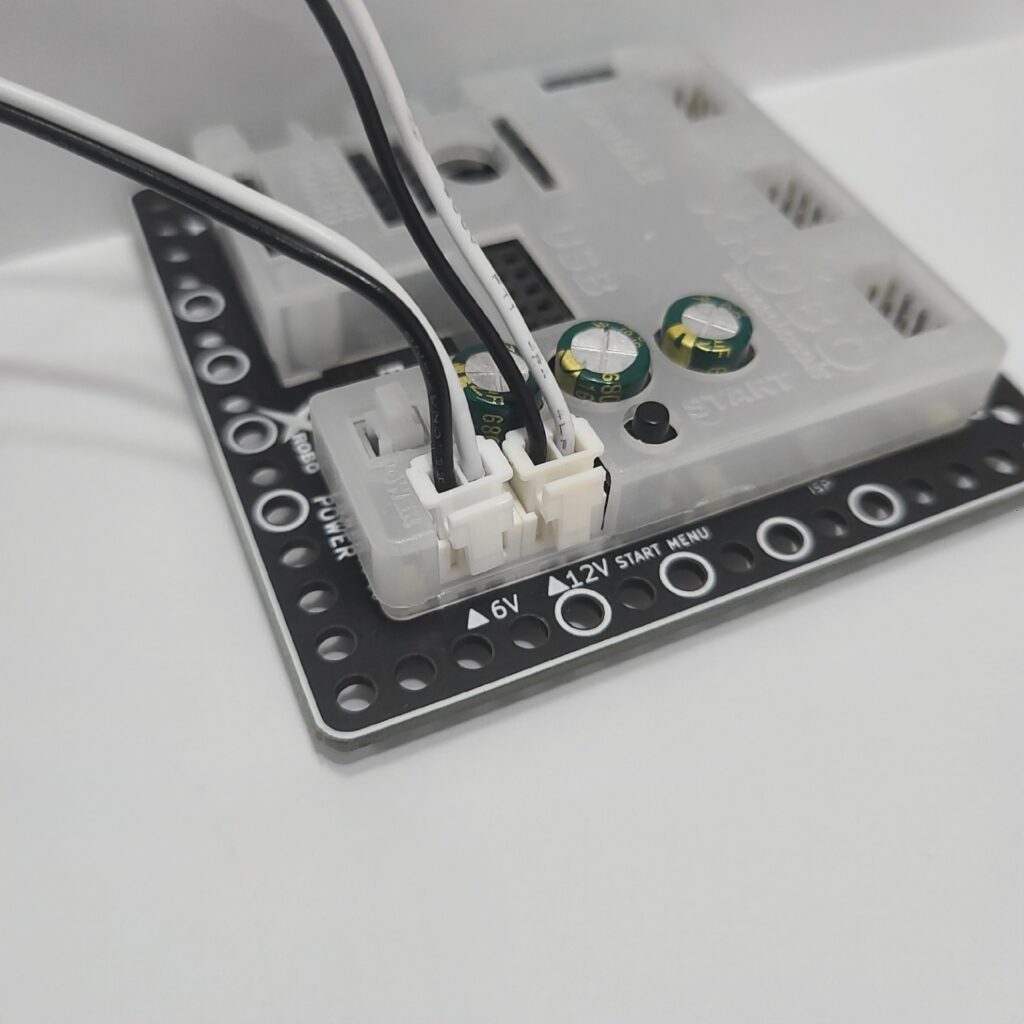
[XB] 7번 디스크롤 로봇 조립 코드 업로드 & 로봇 동작 코딩 예제 로봇 문제 발생 시 해결 XB 가이드 1. 로봇 조립 1) 로봇 조립하기 교재의 조립도를 참고하여 디스크롤을 조립합니다. 2) 케이블 연결 확인하기 왼쪽 바퀴가 달린 왼쪽 DC모터 1 [2개] → M1 포트 오른쪽 바퀴가 달린 오른쪽 DC모터 2 [2개] → M2 포트 왼쪽 블레이드가 달린 아래쪽 DC모터 3 → M3 포트 오른쪽 블레이드가 달린 위쪽 DC모터 4 → M4 포트 디스크를 움직이는 서보모터 → OUT1 포트 왼쪽 LED가 달린 왼쪽 LED 1 → OUT2 포트 오른쪽 LED가 달린 오른쪽 LED 2 → OUT3 포트 2. 코드 업로드 & 로봇 동작 로봇을 동작시키려면 로봇에 동작 프로그램(코드)를 업로드해주어야 해요. 방법 1) [코딩 X] 휴대폰으로 프로그램 업로드하기 코딩을 하고 싶지 않을 때 XROBO 업로더로 동작 프로그램을 업로드할 수 있어요. 안드로이드 폰에서만 앱을 쓸 수 있어요. 바로가기 방법 2) [코딩 X] 컴퓨터로 XROBO가 제공하는 프로그램 업로드하기 코딩을 하고 싶지 않을 때 컴퓨터에서 mBlock으로 동작 프로그램을 업로드할 수 있어요. 윈도우(Windows) 컴퓨터에서만 가능해요. 바로가기 방법 3) [코딩 O] 컴퓨터로 로봇 동작 프로그램 직접 코딩하기 직접 코딩하고 싶을 때 컴퓨터에서 mBlock으로 동작 프로그램을 직접 코딩할 수 있어요. 윈도우(Windows) 컴퓨터에서만 가능해요. 바로가기 방법 1) [코딩 X] 휴대폰으로 프로그램 업로드하기 ① 앱 설치하기 구글 플레이스토어에서 XROBO 업로더 설치 앱 설치하기 ② 휴대폰과 로봇 연결하기 CPU보드에 다운로드 보드 연결 다운로드 보드에 다운로드 케이블 연결 다운로드 케이블 반대편에 USB A to C 변환 젠더 연결 휴대폰에 남은 한쪽 연결 ③ 코드 업로드하기 eXtreme edition 선택 XB 선택 오른쪽 상단의 연결상태 확인 로봇 리스트에서 디스크롤 선택 (자동으로 업로드 됩니다.) ④ 로봇 동작하기 ① CPU보드 전원을 켭니다. ② CPU보드 전원을 켜고, START 버튼을 짧게 눌렀다가 손을 뗍니다. ③ 리모컨 전원을 켜고 로봇을 조종하며 놉니다. 리모컨이 안 될 때 방법 2) [코딩 X] 컴퓨터로 XROBO가 제공하는 프로그램 업로드하기 로봇에 XB 전체 동작 프로그램이 이미 업로드된 경우, 바로 ④로봇 동작하기로 넘어가주세요. ④로봇 동작하기 ① 업로드 준비하기 mBlock이 설치되어 있지 않다면 mBlock을 반드시 설치해주세요. mBlock 설치하기 로봇을 동작시키기 위해 다운로드 보드와 다운로드 케이블이 반드시 필요합니다. 만약 해당 부품이 없다면 구매해주세요. 구매하러 가기 ② 동작 프로그램 다운받아 불러오기 동작 프로그램 사용하기 페이지를 참고해서 XB 동작 프로그램을 다운받고, mBlock에 해당 프로그램을 불러와주세요. 프로그램 다운받기 ③ 코드 업로드하기 업로드 방법 페이지나 영상(34초부터)을 참고해서 로봇에 코드를 업로드해주세요. 업로드 방법 페이지 ④ 로봇 동작하기 ① CPU보드 전원을 켭니다. ② START 버튼을 2초 이상 누르다가, '도레미파솔라시도' 멜로디가 나오면 손을 뗍니다. ③ START 버튼을 7번 눌러 "시" 음을 선택합니다. ④ 리모컨 전원을 켜고 로봇을 조종하며 놉니다. 리모컨이 안 될 때 방법 3) [코딩 O] 컴퓨터로 로봇 동작 프로그램 직접 코딩하기 ① 업로드 준비하기 mBlock이 설치되어 있지 않다면 mBlock을 반드시 설치해주세요. mBlock 설치하기 로봇을 동작시키기 위해 다운로드 보드와 다운로드 케이블이 반드시 필요합니다. 만약 해당 부품이 없다면 구매해주세요. 구매하러 가기 ② 코딩하기 mBlock을 실행시킨 후, 코딩 예제나 교재를 참고해서 자유롭게 프로그램을 코딩해주세요. 코딩 예제 바로가기 ③ 코드 업로드하기 업로드 방법 페이지나 영상(34초부터)을 참고해서 로봇에 코드를 업로드해주세요. 업로드 방법 페이지 ④ 로봇 동작하기 ① CPU보드 전원을 켭니다. ② CPU보드 전원을 켜고, START 버튼을 짧게 눌렀다가 손을 뗍니다. ③ 리모컨 전원을 켜고 로봇을 조종하며 놉니다. 리모컨이 안 될 때 3. 코딩 예제 정답을 확인하고 싶을 땐, 이미지를 옆으로 넘겨보세요. 1) 변수로 블레이드 회전 속도 바꾸기 리모컨 5번 버튼을 눌렀을 때 왼쪽, 오른쪽 블레이드를 속도 10으로 동시에 회전시켜봅시다. 왼쪽 블레이드가 M3 포트에 연결되어 있고, 오른쪽 블레이드가 M4 포트에 연결되어 있으므로, ‘M3’과 ‘M4’의 속도를 ’10’으로 설정해줍니다. ‘빠르기’라는 이름의 변수를 만들어 초기값을 10으로 설정하고, 리모컨 버튼을 누르고 있을 때 블레이드가 ‘빠르기’ 값대로 회전하게 해봅시다. 변수값에 ‘-‘를 붙이거나, ‘-‘를 없애고 싶을 땐 ‘곱하기(*)’ 연산 블록으로 ‘-1’을 곱해준 값을 사용하면 됩니다. 리모컨 7번이나 8번 버튼을 눌렀을 때만 디스크롤 블레이드의 회전 속도를 바꿔봅시다. 블레이드 ① 5번 버튼 : 블레이드 회전 속도 변경 ① 7번 버튼 : 변수 '빠르기' 1만큼 늘리기 ② 8번 버튼 : 변수 '빠르기' 1만큼 줄이기 버튼을 딱 한 개만 눌렀을 때 특정 동작을 하고 싶다면, ‘블루투스 2개’ 블록에서 버튼 2개 중 하나를 ‘0’으로 설정합니다. 블레이드의 회전 속도를 1~20 사이로 제한해봅시다. 블레이드 ① 5번 버튼 : 블레이드 회전 속도 변경 ① 7번 버튼 : 변수 '빠르기'가 20보다 작으면 1만큼 늘리기 ② 8번 버튼 : 변수 '빠르기'가 0보다 크면 1만큼 줄이기 2) 리모컨으로 디스크롤 조종하기 리모컨 버튼을 눌렀을 때 디스크롤을 이렇게 움직이게 해봅시다. 바퀴 ① 1번 버튼 : 전진 ② 2번 버튼 : 후진 ③ 3번 버튼 : 좌회전 ④ 4번 버튼 : 우회전 ⑥ 1·8번 버튼 동시에 : 오른쪽 곡선 주행 ⑤ 1·7번 버튼 동시에 : 왼쪽 곡선 주행 블레이드 ① 5번 버튼 : 블레이드 회전 속도 변경 ① 7번 버튼 : 변수 '빠르기'가 20보다 작으면 1만큼 늘리기 ② 8번 버튼 : 변수 '빠르기'가 0보다 크면 1만큼 줄이기 4. 로봇 문제 발생 시 해결 1) 전원이 켜지지 않을 때 ① 배터리 극성 확인 (클릭) 배터리가 올바른 극성으로 삽입되어 있는지(‘+’와 ‘-‘가 맞게 끼워져 있는지) 확인합니다. 배터리 케이스 배터리 분리배터리 케이스에 표시된 배터리 극성 확인배터리 평평한 부분('-'극)이 케이스의 스프링에 오도록 연결배터리 극성 확인 ② 배터리 팩 케이블 확인 (클릭) 배터리 팩 케이블이 단선되지 않았는지 확인합니다. 배터리 팩 케이블이 CPU보드 6V, 12V전원 커넥터에 각각 잘 꽂혀있는지 확인합니다. 6V, 12V에 배터리 팩 케이블 연결 2) 리모컨으로 조종이 안 될 때 문제 해결하기 3) DC모터가 회전하지 않을 때 / 반대로 회전할 때 ① DC모터 케이블 연결 여부 확인 (클릭) DC모터 케이블이 M1, M2, M3, M4 포트에 제대로 꽂혀있는지 확인합니다. M1 [2개], M2 [2개], M3, M4 포트에 연결 ② DC모터 케이블 연결 상태 확인 (클릭) 모터 케이블이 CPU보드 모터 포트에 세로로 꽂혀있는지 확인합니다. 가로로 연결되면 모터가 회전하지 않을 수 있습니다. 모터 케이블의 검은색 선이 CPU보드 케이스의 화살표가 가리키는 방향에 꽂혀있는지 확인합니다. 케이블이 반대로 연결된 경우, DC모터가 반대로 회전합니다. 각각의 DC모터 케이블이 정확한 모터 포트에 꽂혀 있는지 확인합니다. 케이블이 잘못된 포트에 연결된 경우, 로봇이 이상하게 동작할 수 있습니다. 화살표에 검은색 선이 오게 연결 ③ DC모터 드라이브보드 확인 (클릭) DC모터 드라이브보드가 제대로 끼워져 있는지 확인해주세요. 만약 빠져있다면 올바르게 삽입한 후, 전원을 켜고 동작을 확인합니다. DC모터 드라이브보드가 2개 꽂혀 있는지 확인해주세요. 드라이브보드가 없으면 DC모터가 회전하지 않습니다. DC모터 드라이브보드가 조립도와 똑같이 꽂혀있는지 확인해주세요. 만약 다르게 꽂혀면 전원을 켜지 말고 조립도와 같은 모양으로 삽입합니다. (잘못 연결한 상태에서 로봇 동작 시 발열 위험이 있으므로 주의합니다.) DC모터 드라이브보드 2개 4) LED가 제대로 동작하지 않을 때 ① LED 연결 상태 확인 (클릭) 3-PIN 케이블이 정확한 OUT 포트에 연결되어 있는지 확인합니다. 3-PIN 케이블의 검은색 선이 LED 핀 중 하얀 라인이 있는 쪽에 꽂혀있는지 확인합니다. 3-PIN 케이블의 검은색 선이 CPU보드 케이스의 화살표가 가리키는 방향에 꽂혀있는지 확인합니다. LED 케이블 연결 전LED 케이블 연결 후OUT2, OUT3 포트 연결 5) 서보모터가 제대로 동작하지 않을 때 ① 서보모터 연결 상태 확인 (클릭) 3-PIN 케이블이 정확한 OUT 포트에 연결되어 있는지 확인합니다. 서보모터 케이블의 검은색 선이 CPU보드 케이스의 화살표가 가리키는 방향에 꽂혀있는지 확인합니다. OUT1 포트 연결CPU보드 화살표에 검은색 선이 오도록 케이블 연결 ② 서보모터 조립 방향 확인 (클릭) 조립된 로봇의 서보모터 라벨의 방향이 조립도와 같은지 확인합니다. 라벨 방향이 반대로 되어 있으면 서보모터가 반대로 동작하거나 각도가 맞지 않아 기어 파손 위험이 있습니다. 6) 로봇 동작이 이상할 때 ① 모터 축 방향 확인 (클릭) 조립된 로봇의 DC모터 축 방향이 조립도와 같은지 확인합니다. 모터 축이 잘못 조립되면 로봇 바퀴가 프레임에 걸려 제대로 동작하지 않습니다. ② 케이블 확인 (클릭) 케이블이 구동부에 걸리지 않았는지 확인합니다. 케이블이 구동부에 걸려있는 경우, 로봇이 잘 동작하지 않을 수 있습니다. ③ 조립상 문제 확인 (클릭) 조립도대로 정확히 조립했는지 확인합니다. 조립이 잘못된 경우, 로봇이 잘 동작하지 않을 수 있습니다.







![M1 [2개], M2 [2개], M3, M4 포트에 연결](https://xrobo.co.kr/wp-content/uploads/2024/07/solution-motorconnection-112234-1024x1024.jpg)