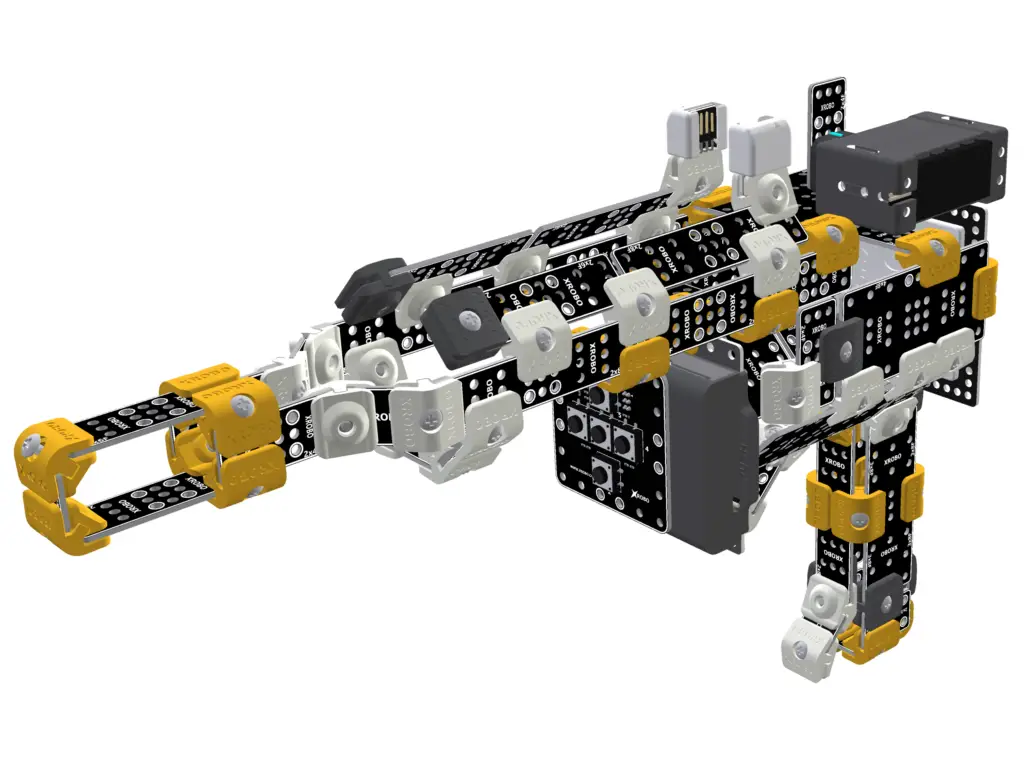
Ensure that the direction of the servo motor label in the assembled robot matches the assembly diagram. If the label is oriented incorrectly, the servo motor may operate in reverse, or the angle may be incorrect, posing a risk of gear damage.
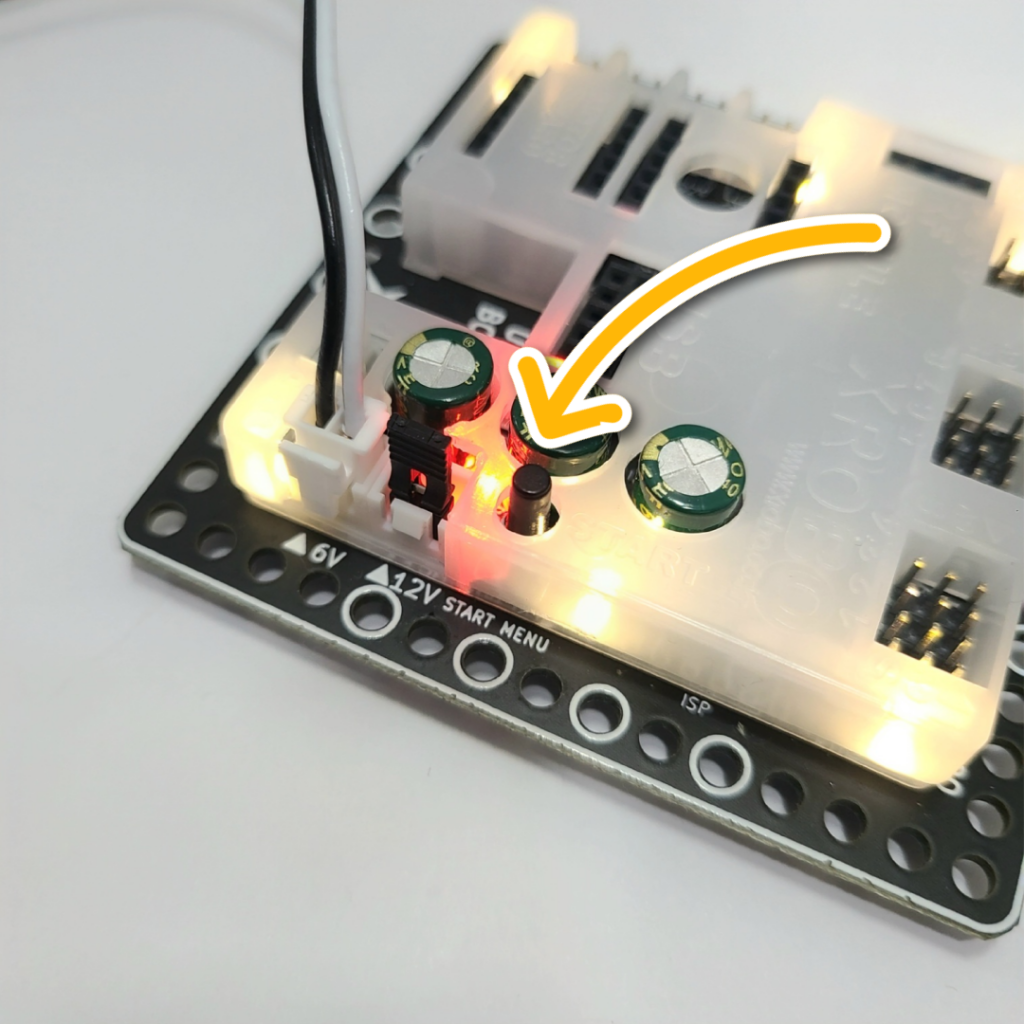
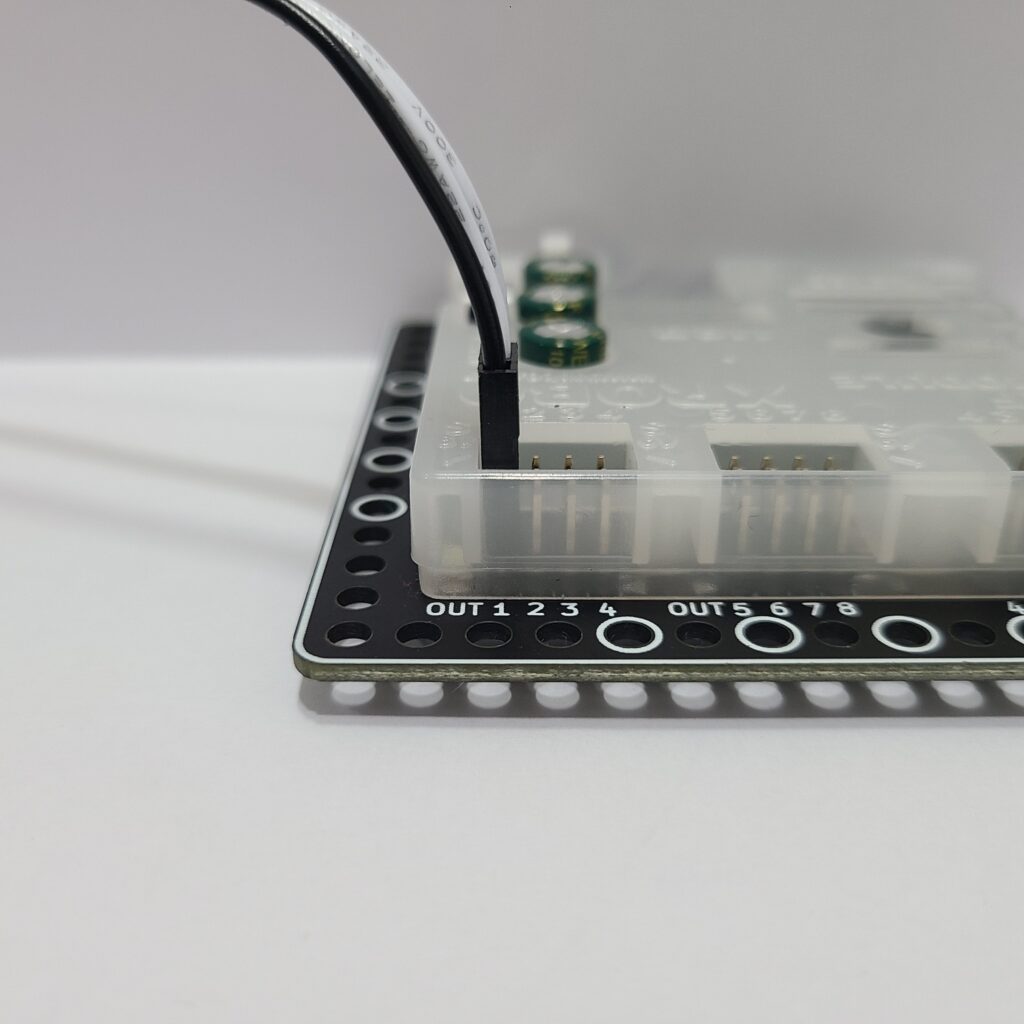
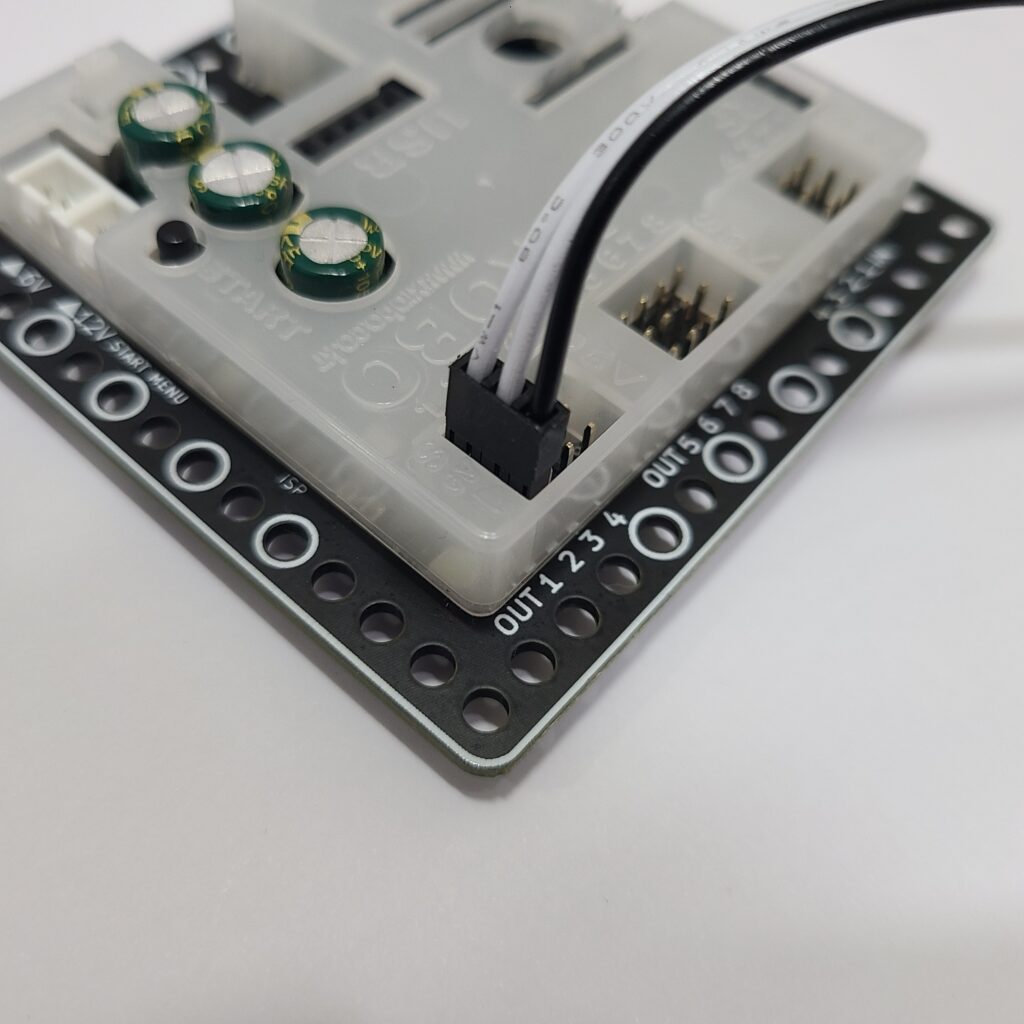
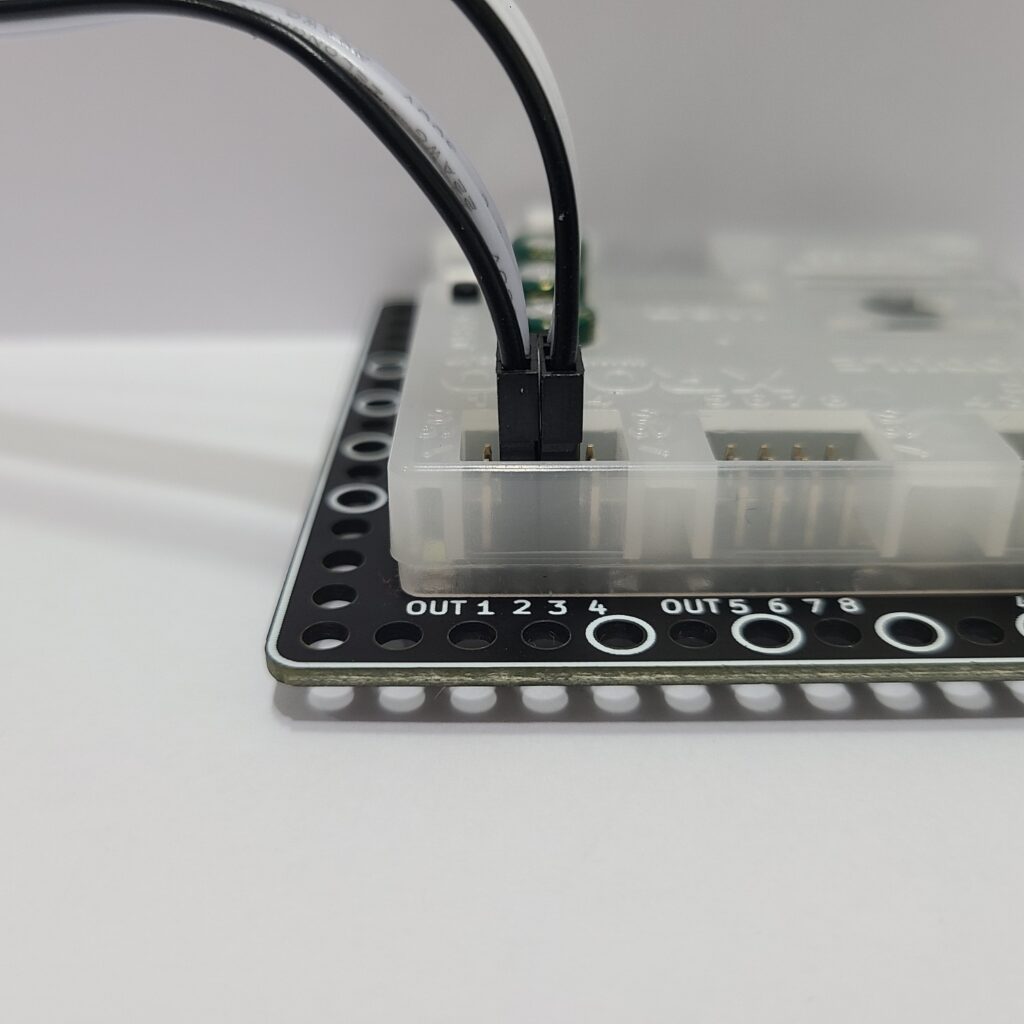
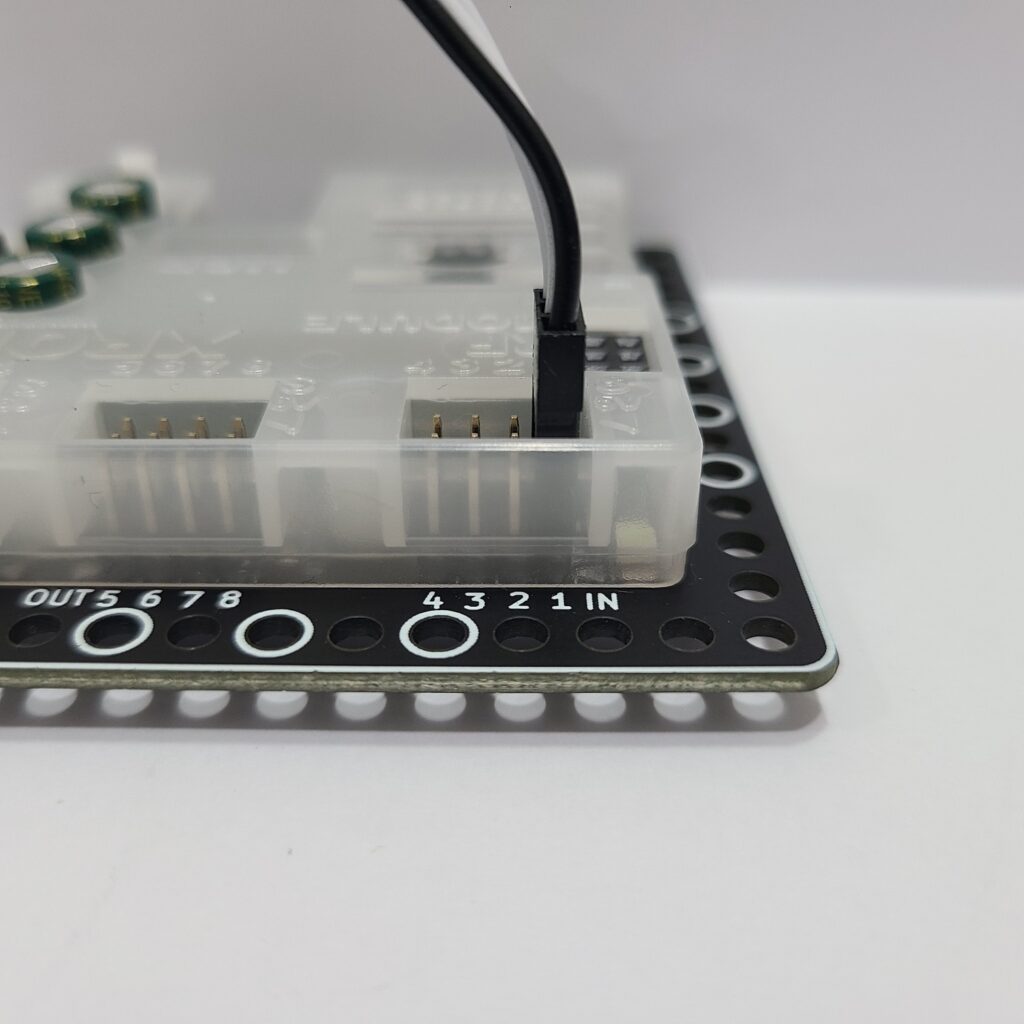
Verify that the black wire of the 3-PIN cable is connected to the side with the white line on the X-keypad pin. (Inserting the 3-PIN cable in reverse can cause a short circuit, resetting the CPU board.)
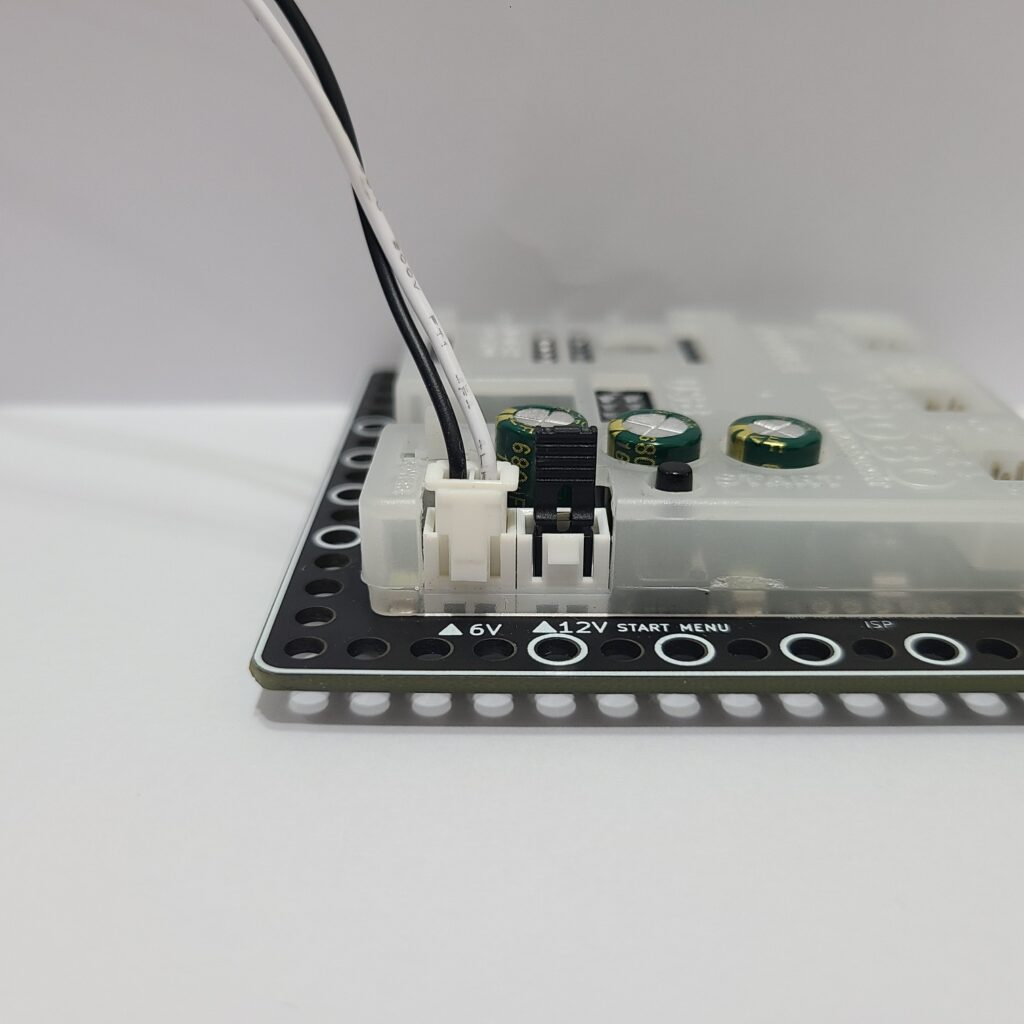
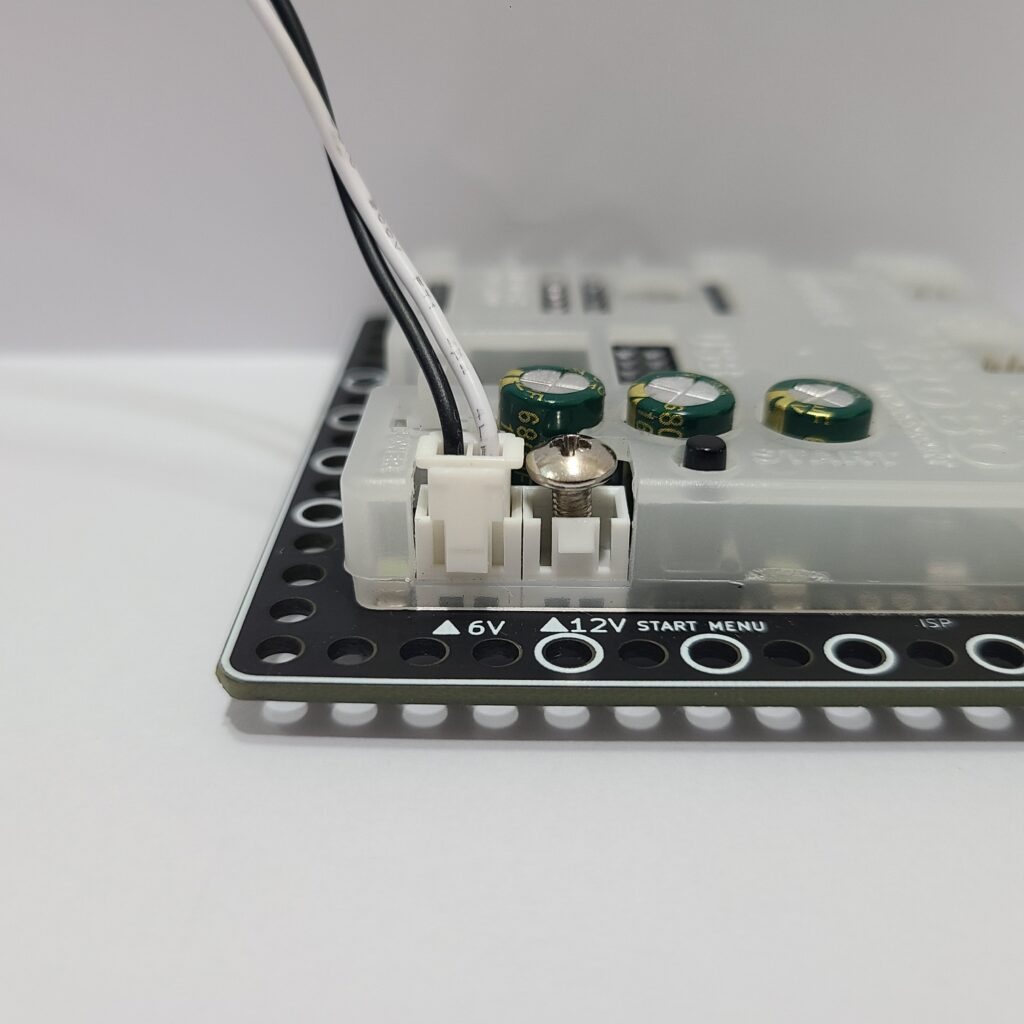
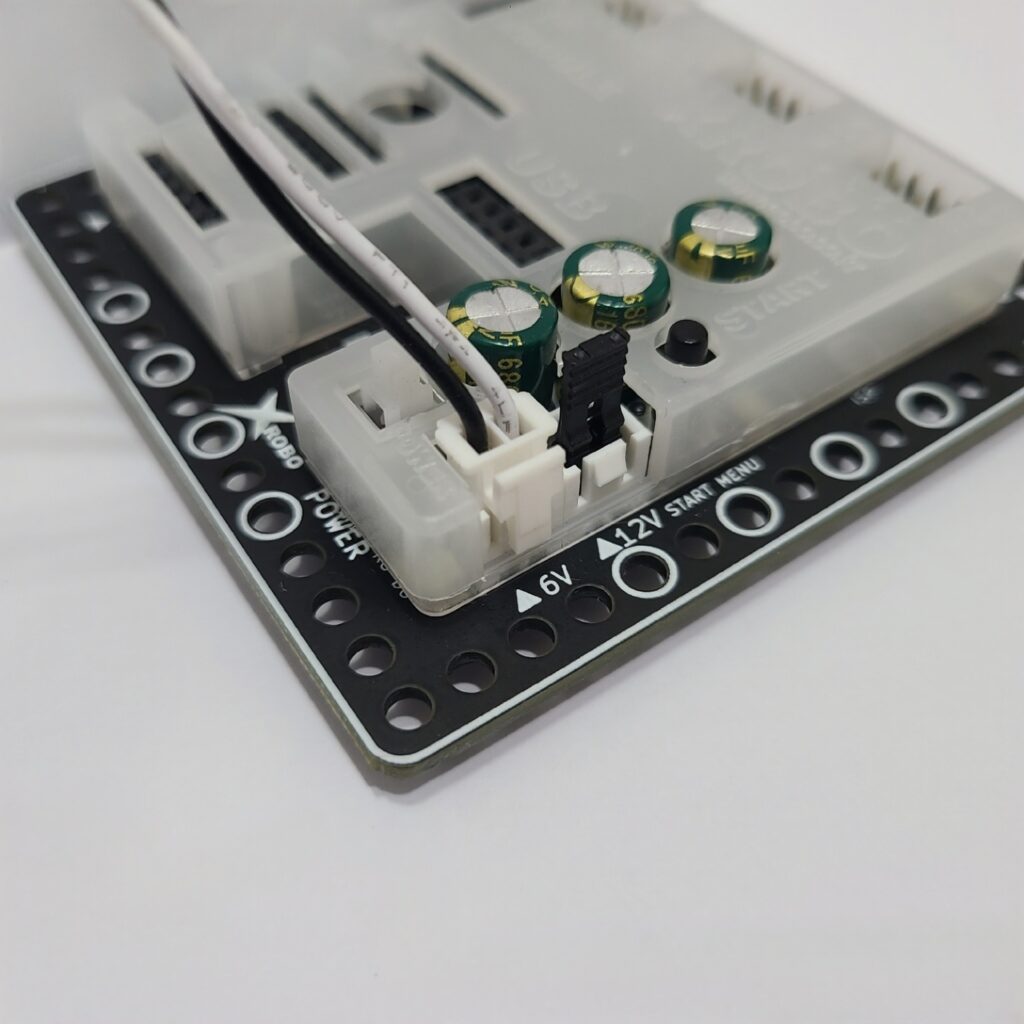
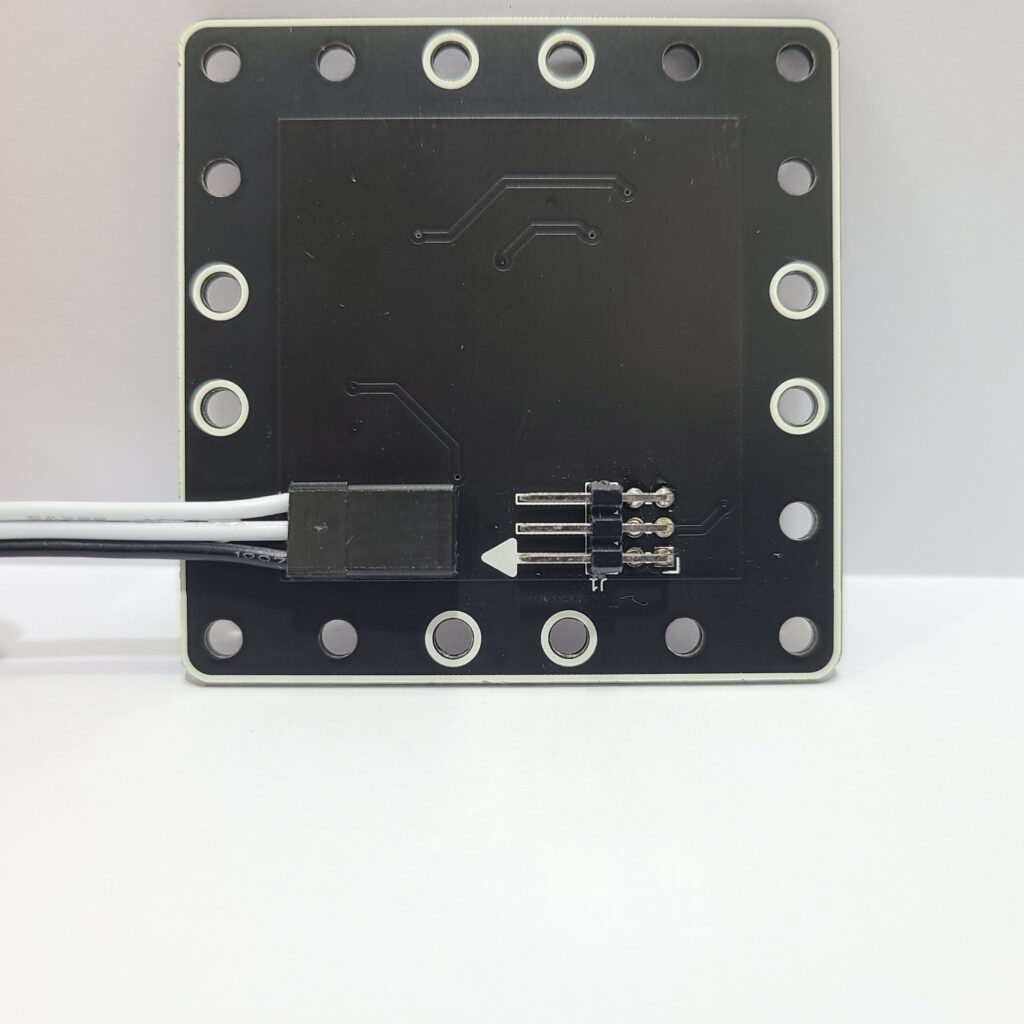
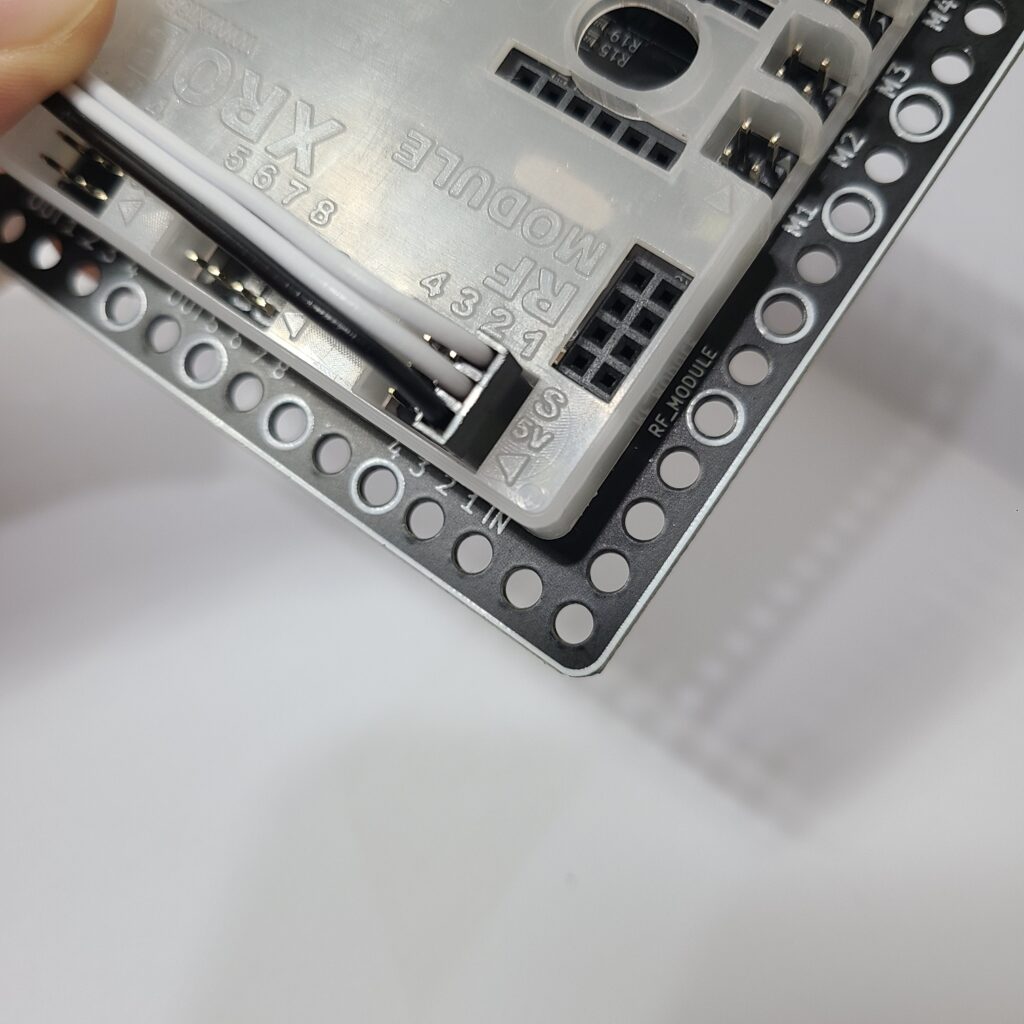
Ensure that the black wire of the 3-PIN cable is aligned with the arrow on the CPU board case. (Reversing the 3-PIN cable can cause a short circuit, resetting the CPU board.)