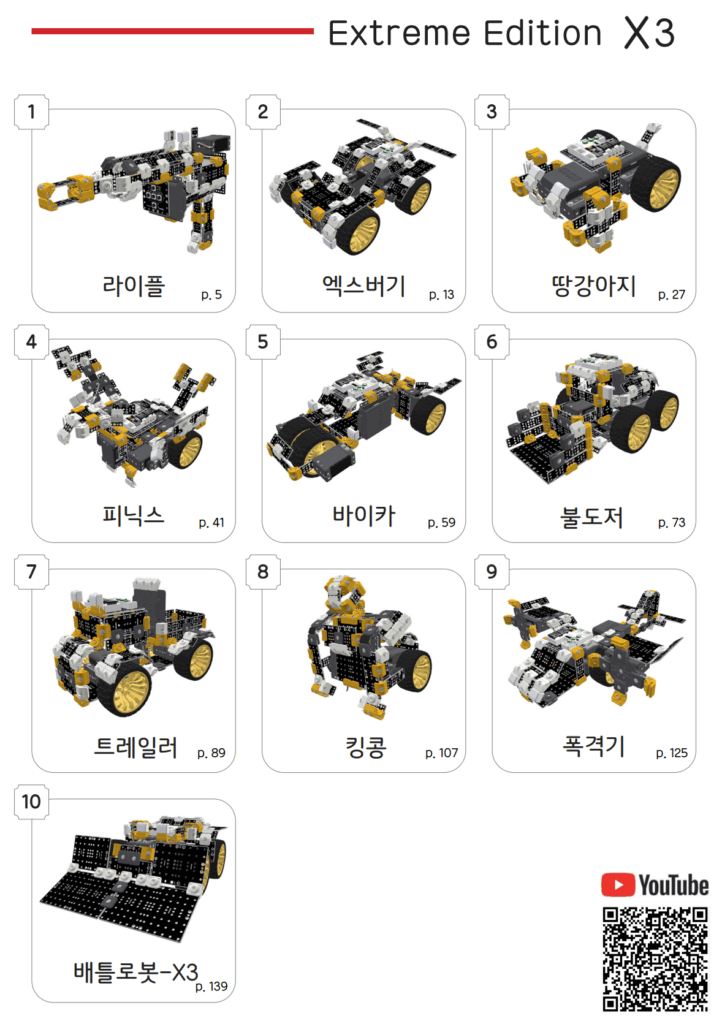
커리큘럼 단계별로 차근차근. 하드웨어/소프트웨어 개념을 체계적으로 학습해요. 단계별로 차근차근. 하드웨어/소프트웨어 개념을 체계적으로 학습해요. 정규 1단계 X1 ⟶ 2단계 X2 ⟶ 3단계 X3 ⟶ 4단계 X4 ⟶ 5단계 X5 ⟶ 6단계 X6 XB XW SD 특정 과정을 할 땐 이전 정규 단계의 부품이 모두 있어야 합니다. 예1) X5 과정: X1, X2, X3, X4 필요 예2) XW 과정: X1, X2, X3, X4 필요 정규 1단계 X1 2단계 X2 3단계 X3 4단계 X4 XB SD 5단계 X5 XW 6단계 X6 ※ 특정 과정을 할 땐 이전 정규 단계의 부품이 모두 있어야 합니다. 예1) X5 과정: X1, X2, X3, X4 필요 예2) XW 과정: X1, X2, X3, X4 필요 X1 학습 내용 X-키패드를 이용한 로봇 제어와 언플러그 코딩 학습 DC 모터의 회전 운동 학습 프로그래밍 순차 실행 개념 & 기초 하드웨어 제어 코딩 학습 X2 학습 내용 RF 리모컨을 사용한 무선 제어 학습 유연한 동작 구현을 위한 플렉시블 프레임 사용 서보모터를 이용한 그랩 구조와 리프트 구조 학습 창의력 향상을 위한 추가 조립도 제공 while 반복문 학습 X3 학습 내용 4개의 모터를 사용한 4륜 구동 구조 사용 서보모터를 사용한 조향장치 구현 추가 전원 공급으로 빠르고 강력해진 움직임 if, if-else 조건문 학습 X4 학습 내용 링크 구조의 다양한 로봇 제작 300rpm DC모터를 사용한 고속 주행 모터속도 제어를 위한 변수 사용 XB 학습 내용 6륜 구동 로봇 제작 배틀 기구물 사용으로 다양한 배틀 로봇 제작 이벤트 루프를 구성하는 다양한 코딩 학습 SD 학습 내용 다양한 센서(Sensor)와 디스플레이(Display)를 활용한 로봇 제작 변수, 조건문, 반복문 코딩 학습을 통한 게임 구현 X5 학습 내용 300rpm DC모터 4개를 사용한 고속 4륜 구동 서보모터 2개를 사용하여 다양한 동작 구현 변수와 조건문 활용 학습 XW 학습 내용 2개의 CPU를 동시에 제어 다양한 센서를 이용한 웨어러블 조종기 제작 (키패드, 자이로 센서, 접촉 센서, 적외선 센서) X6 학습 내용 불규칙한 지형이나 큰 장애물이 있는 환경에서 뛰어난 성능을 발휘하는 115pi 바퀴 사용 동작 모드 변수를 이용한 변신 로봇