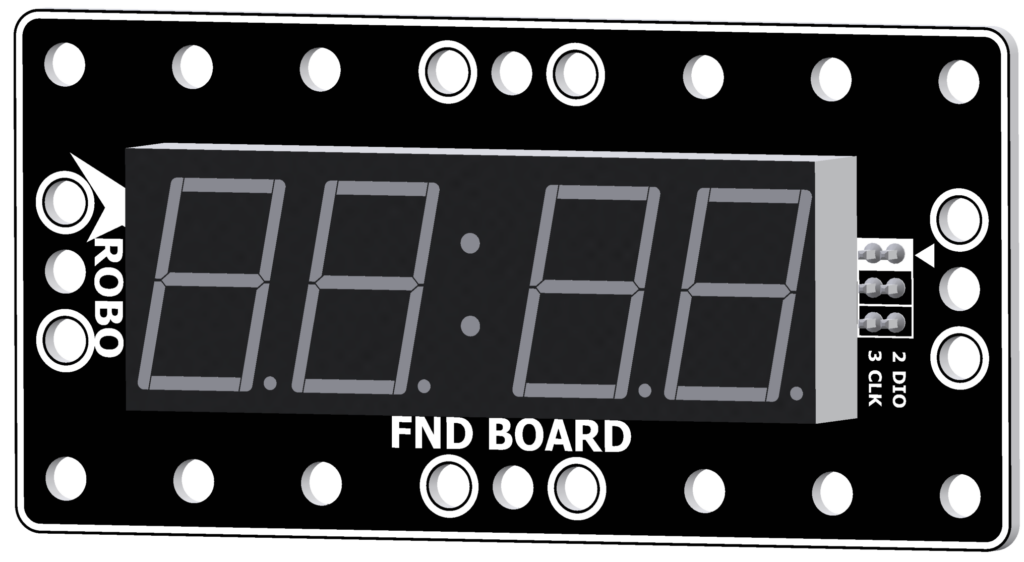
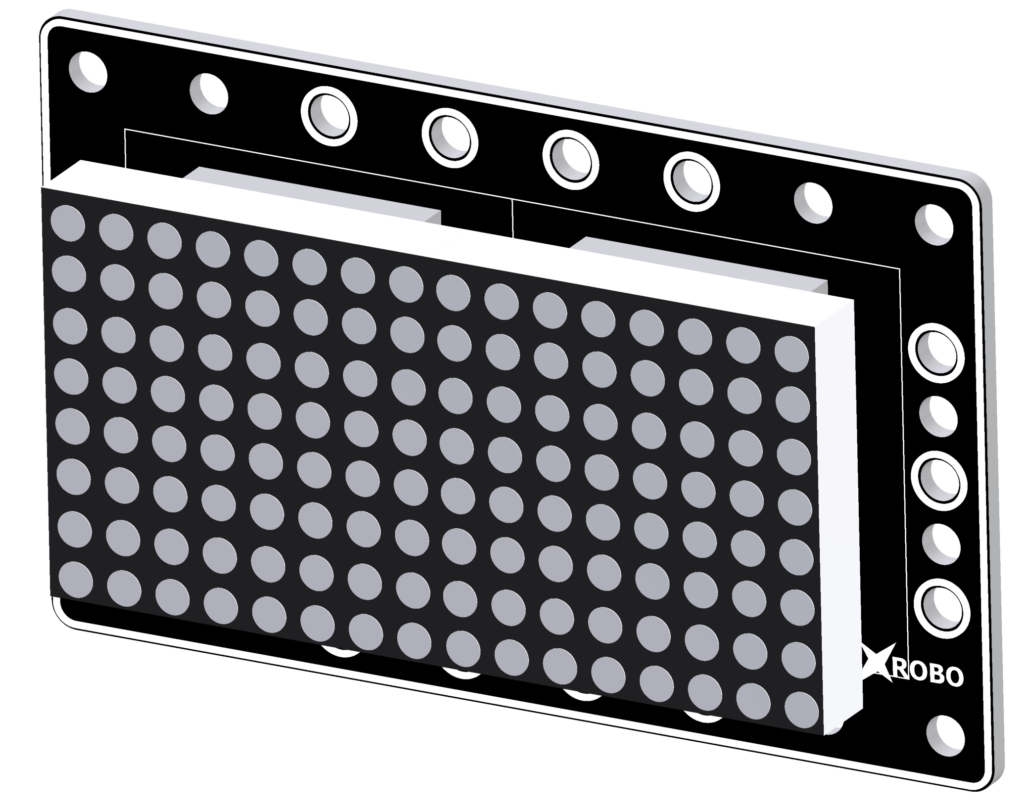
도트매트릭스보드 후면의 ①LOAD핀, ②CLK핀, ③DIN핀에 3-PIN 케이블을 각각 연결합니다. 그 후 각 케이블의 다른 한쪽을 CPU보드의 입력 포트에 연결합니다.
[동작모드]에서는 이렇게 핀을 연결합니다. ① LOAD핀 – OUT2, ② CLK핀 – OUT3, ③ DIN핀 – OUT4
도트매트릭스보드의 입력을 받는 코드를 업로드하여 작동시킵니다. 이때 ①LOAD핀, ②CLK핀, ③DIN핀에 연결된 케이블이 각각 몇 번 입력 포트에 연결되어 있는지 주의하여 코딩합니다.